
Use this command to control the group bond status. A bonded group can be moved as one, by sending a motion command to any individual XBot in the connected group.
Fieldbus Interface
PMC_BondXbotGroup
Ethernet Interface
PMCRTN BondXbotGroup(int groupID, bool isBond, GROUPBONDOPTIONS bondoptions)
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
XBot(s) State is Idle or Stopped. |
|
Postconditions |
The XBot(s) in the group will be bonded or unbonded. |
Description
Use this command to control the group bond status. A bonded group can be moved as one, by sending a motion command to any individual XBot in the connected group. The motion command target position will be applied to that XBot. This can also be used to unbond the XBots in the group.

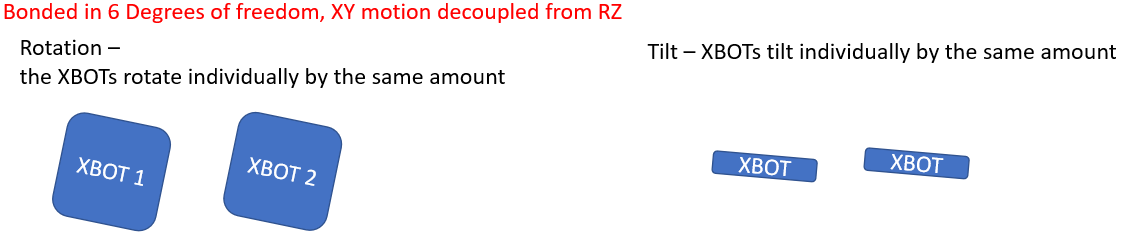
in XY decoupled from RZ Mode:
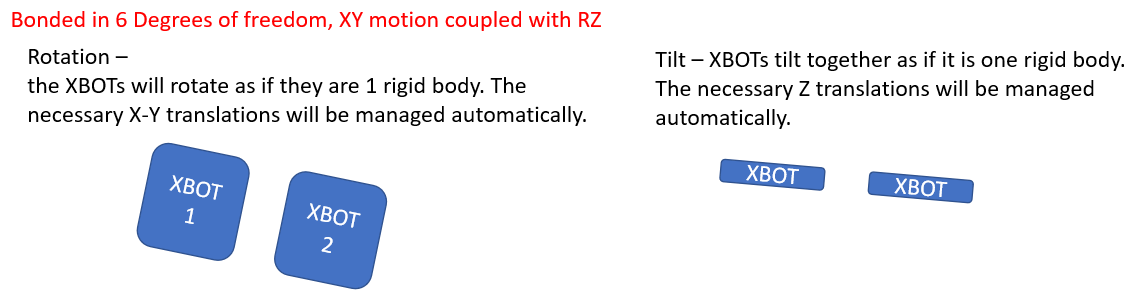
in XY coupled with RZ Mode:
-
When one XBot is operated by one command such as motion commands, levitation command, stream command, stop command, all members in the group will be indirectly driven by the command as well by maintaining the relative positions
-
Levitation and force mode in a connected group will cause all XBots to experience the same levitate/land and force mode on/off command. Relative positions between XBots may no longer be maintained