
The Single Axis Motion command can be used to move the XBot in a single axis (any of the 6 axis).
Fieldbus Interface
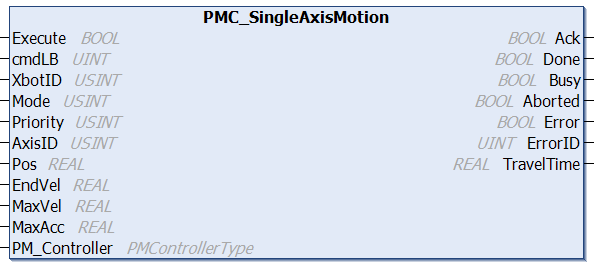
PMC_SingleAxisMotion
Ethernet Interface
MotionRtn LinearSingleAxisMotionSI(uint cmdLabel, int xbotID, POSITIONMODE positionMode, AXISNAME axis, double targetPos, double finalSpeed, double maxSpeed, double maxAcceleration)
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
XBot is in the Idle state, Obstacle Detected state, Motion state, Stopped state, Hold Position state, or Waiting state. |
|
Postconditions |
If the XBot is ready to immediately begin executing the command, then the XBot will enter the Motion state. Otherwise, the XBot state remains unchanged, but the command will be added to the XBot's motion buffer. |
Description
The single axis motion command can be used to move the XBot towards the target position in 1 axis, without the need to know the current position of the XBot in any other axis.
-
The target position can be specified either in absolute coordinates or relative coordinates. Relative coordinates are relative to the reference position of the XBot when the command begins execution
-
The maximum speed and acceleration must be specified. The input maximum speed and acceleration will be automatically adjusted if they are below or above the configured system limit settings
-
The desired ending speed must also be specified:
-
Ending speed = 0 means that the XBot will stop at the end target position
-
Ending speed > 0 can be used to connect multiple motion commands seamlessly (see below, functions the same way as XY Linear Motion)
-
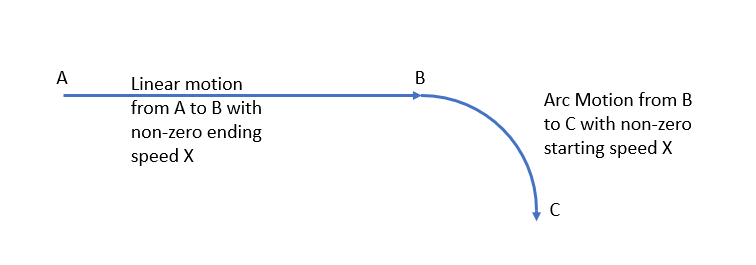
If the ending speed is non-zero but no motion command is available to be run by the XBot when it is done executing the initial linear motion command, the XBot will:
-
Begin decelerating to a complete stop after reaching the target position
-
Backtrack to the target position in the shortest time possible after stopping completely
-
Therefore, it may appear as though the XBot has overshot its target position. If the target position is located close to the flyway boundary and would cause the overshoot to exceed the flyway boundary, then the command will be rejected
If the ending speed is unachievable within the distance available between the starting and end positions, the PMC will automatically limit the ending speed to an achievable value.
Changelog
PMC v11687 - added Priority Input