
A mover stereotype is a collection of settings for a particular mover type, that can be applied to any number of movers of the same type.
Each mover type has its own collection of up to 255 user defined stereotypes [1,254], as well as 2 special stereotypes, 0 and 255. The activation and levitation settings for each mover type is stored in stereotype 255, which may be edited by the user.
Stereotype 0 is a read only stereotype, where all parameters are 0.
An example work flow is as follows:
-
System boot up, all movers assigned stereotype ID = 255 for their corresponding mover type
-
Create a mover stereotype 1 for mover type A
-
Assign mover stereotype 1 for mover type A to mover 1 (of type A)
-
Assign mover stereotype 1 for mover type A to mover 2 (of type A)
-
Create a mover stereotype 1 for mover type B
-
Assign mover stereotype 1 for mover type B to mover 3 (of type B)
When carrying loads, the XBots typically can be controlled well in a robust way without user intervention. This command can be used to further improve the performance.
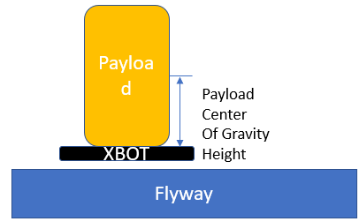
When an XBot is carrying a heavy load of significant height, the XBot + payload’s center of gravity will be a significant distance away from the XBot center. This command can be used to enhance the control performance.
The payload’s center of gravity height can be provided to the PMC, the PMC can calculate the combined center of gravity and improve system performance.
The payload’s center of gravity X & Y position relative to mover center can be specified as well to further enhance performance.
If the payload’s XY dimensions (footprint) exceed the XBot’s footprint, the payload’s footprint can be specified in this command as well. The PMC will use the provided payload footprint to assist in obstacle detection and handling.
A control performance level can be specified for the XBot. 0 means conservative control algorithm, with superior stability but longer settling time. 3 is the most aggressive control algorithm, with reduced stability but shorter settling times.