
When using Real-Time Ethernet to connect to the system, after the reference stream channel has been set up using the Stream Mode Control command, this command is used to write to the reference stream channel.
Fieldbus Interface
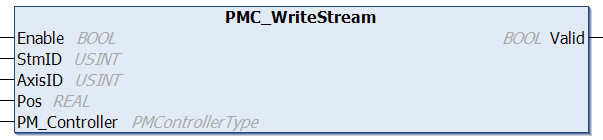
PMC_WriteStream
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
Reference Stream channel has been set up using the Stream Mode Control command |
|
Postconditions |
The reference stream data is updated with the relevant input from this function |
Description
When using Real-Time Ethernet to connect to the system, after the reference stream channel has been set up using the Stream Mode Control command, this command is used to write to the reference stream channel.
Behaviour During Obstacles
If an XBot encounters an obstacle (i.e. another XBot is in the way) while following a stream, it will go to the Stopped State. Its motion will not be resumed even if the obstacle XBot is moved away. To continue writing values to the XBot through the stream, the stream needs to be enabled again using Stream Mode Control.