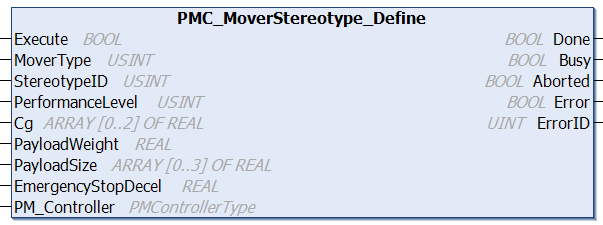
A Mover Stereotype is a collection of settings for a particular mover type, that can be applied to any number of movers of the same type. Use this command to define a Mover Stereotype.
Stereotype ID, valid range [1,255]. 255 is used for Activation and Levitation.
PerformanceLevel
USINT
Valid range [0, 3]. 0 = most stable, 3 = most responsive
Cg
REAL[0..2]
Overall center of gravity [Cgx, Cgy, Cgz], in meters.
PayloadWeight
REAL
Payload weight, in kg
PayloadSize
REAL[0..3]
Payload size as measured from XBot center. [+x, -x, +y, -y] dimensions, in meters.
NOTE: +x, +y > 0 and -x, -y < 0. Currently the payload is considered symmetrical, if you have a payload with physical dimension [+x, -x, +y, -y] = [1, -0.1, 0.8, 0.01]; this payload will be normalized to size [1, -1, 0.8, -0.8], using the furthest distance away from the center of the XBot; the software boundary will use this normalized size for obstacle detection.
EmergencyStopDecel
REAL
The deceleration used during obstacle handling/emergency stops. If set to 0, the emergency deceleration set in the configuration will be used.
PM_Controller
PMControllerType
Data structure that specifies which PMC to connect to. There should be only 1 instance of this variable for each connected PMC.
Outputs
Name
Data Type
Description
Done
BOOL
Execution successful. Function block is finished. (Note: Done will not become TRUE if Execute is already FALSE)
Busy
BOOL
Function block is active and must continue to be called.
Aborted
BOOL
Command aborted by another command.
Error
BOOL
If there is an error in processing the command, then Error = TRUE, otherwise, FALSE.
The specified Mover Stereotype is created or updated. If it is an update, any XBots using the specified Mover Stereotype will receive the updated parameters.
Description
A Mover Stereotype is a collection of settings for a particular mover type, that can be applied to any number of movers of the same type. Use this command to define a Mover Stereotype.
Stereotype 0 is read-only, and its parameters are all 0
Stereotype 255 is for activation and levitation, it is the default assigned stereotype at system boot up.
The center of gravity parameter is for the overall system including the XBot. In most cases, the overall system is not a one-body system, so getting the right parameter requires experimental tuning instead of mathematically calculations.
A control performance level can be specified for the XBot. 0 means conservative control algorithm, with superior stability but longer settling time. 3 is the most aggressive control algorithm, with reduced stability but shorter settling times.
EmergencyStopDecel is used to change the obstacle handling deceleration limit. If this value is set to 0, then the emergency deceleration set in the configuration will be used.