
Get the status of an XBot Motion Buffer.
Fieldbus Interface
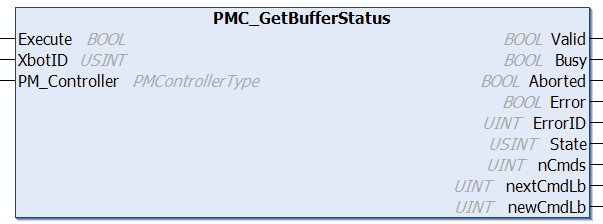
PMC_GetBufferStatus
Ethernet Interface
MotionBufferReturn MotionBufferControl(int xbotID, MOTIONBUFFEROPTIONS bufferOption)
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
None |
|
Postconditions |
The XBot’s buffer status will be provided in the output |
Description
Get the status of an XBot Motion Buffer.
-
The next command label is the upcoming command in the Motion Buffer (will be executed first)
-
The new command label is the newest command in the Motion Buffer (will be executed last)
There is no explicit command to get the buffer status using Ethernet. Instead, the status is provided in the return value when blocking/unblocking the motion buffer.