
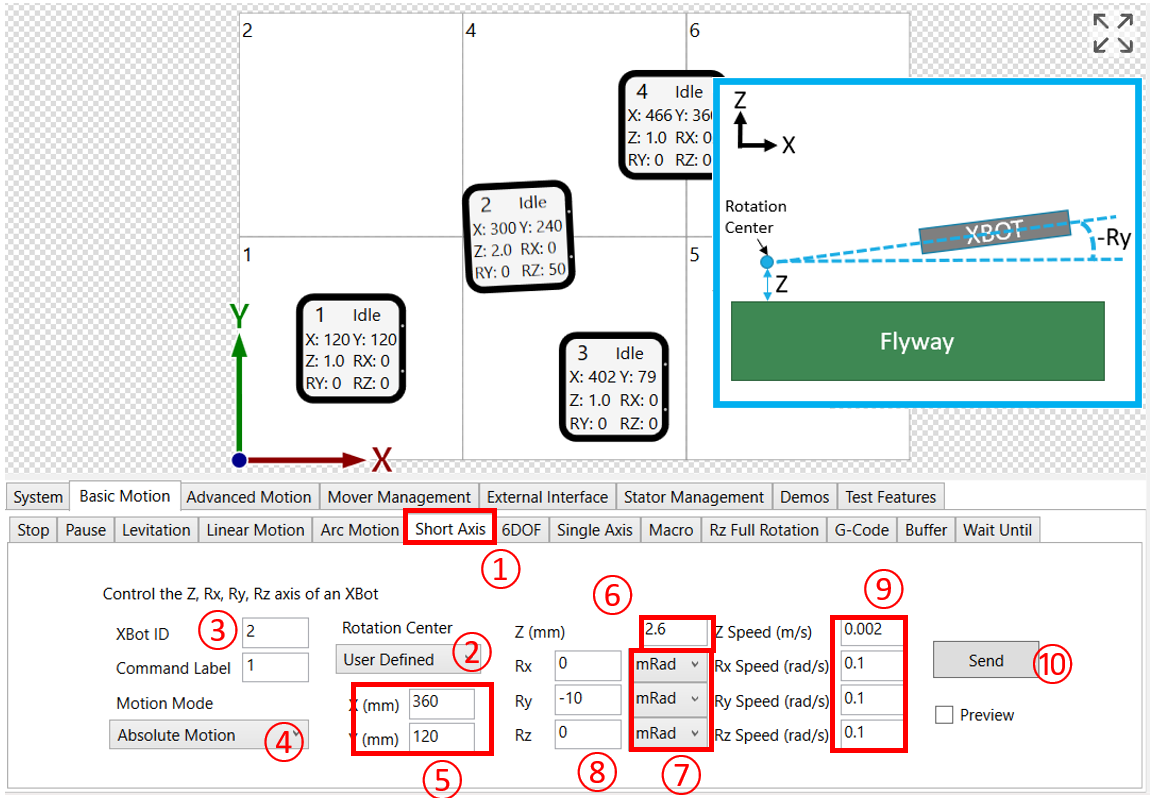
① Click the Basic Motion \ Short Axis tab
② Choose User Defined for the rotation center
③ Enter the XBot ID
④ Absolute Motion means Z, Rx, Ry, Rz are specified in absolute coordinates; Relative means Z, Rx, Ry, Rz are specified relative to the current XBot Z, Rx, Ry, Rz positions
⑤ Specify the X & Y position of the rotation center. (Always in absolute coordinates)
⑥ Specify the Z position of the rotation center
⑦ Choose desired unit for rotation angles (mrad or degrees)
⑧ Enter target position
⑨ Enter speed parameters
⑩ Click “Send” when ready
Note:
-
If the user defined center is not the XBot center, non-zero Rx and Ry will affect the Z position of the XBot as well as the Rx and Ry position of the XBot.
-
If the user defined center is not the XBot center, non-zero Rz will affect the X, Y position of the XBot as well as the Rz position of the XBot.