
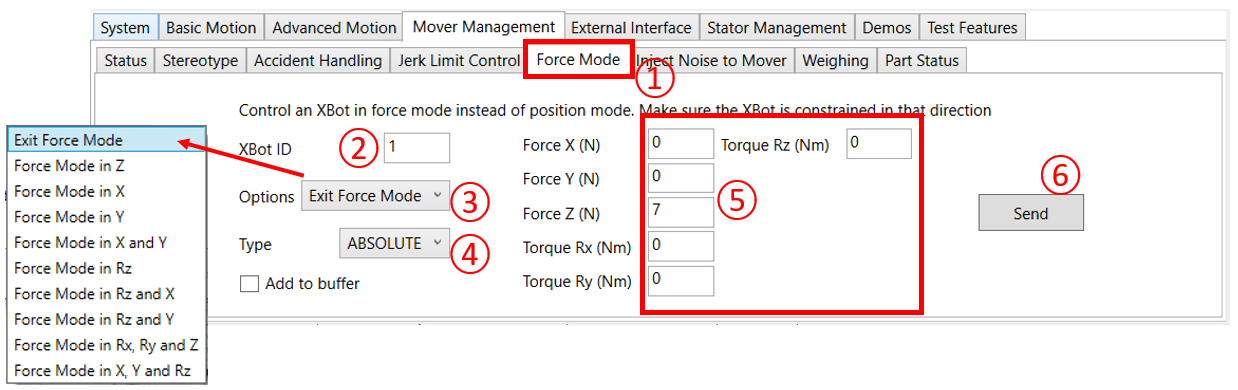
① Click the Force Mode tab
② Enter the XBot ID for the XBot to switch to Force Mode control. When the XBot is in force control in a certain axis, it will exert the specified force, instead of maintaining a position
③ Choose which axis of the XBot should be in Force mode
④ Choose if the force value should be Absolute or Relative
⑤ Enter the force vector. The relevant values depends on the selection in step ③
⑥ Click “Send” when ready
Note:
-
It is best to constrain the XBot in the direction of the applied force, so it doesn’t accelerate forever and lose control.
-
When entering force mode, specify a force value close to the current force feedback value (Get XBot Status command), in order to achieve smooth motion during the switch from position mode to force mode.
-
Once in force mode, additional force mode commands can be used to change the force according to application needs.