
Monitor the specified digital input. When the monitoring condition is met, the wait until command will finish. See also Using Digital Input to PMC.
Fieldbus Interface
PMC_WaitUntilFBDI
Ethernet Interface
PMCRTN WaitUntil(ushort cmdLabel, int xbotID, TRIGGERSOURCE triggerSource, WaitUntilTriggerParams triggerParameters)
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
XBot is in the Idle state, Obstacle Detected state, Motion state, Stopped state, Hold Position state, or Waiting state. |
|
Postconditions |
If the XBot is ready to immediately begin executing the command, then the XBot will enter the Waiting state. Otherwise, the XBot state remains unchanged, but the command will be added to the XBot's motion buffer. |
Description
Wait Until commands ensure an XBot does not execute additional commands until certain configurable conditions are met, this command waits until the specified Digital Input has been received. See also Using Digital Input to PMC.
Consider the following trajectory: 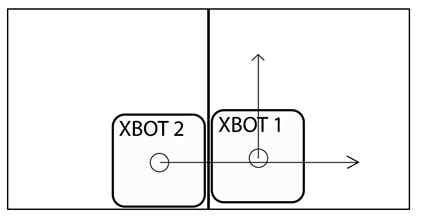
XBot 2 must wait for XBot 1 to complete it’s motion before XBot 2 can move to its target destination.
XBot 2 can execute a Wait Until command using an external Digital Input Trigger or Fieldbus Input Trigger before executing its motion command: the Wait Until command will wait for an external Digital Input or Fieldbus Input to trigger before finishing. If the external device or Controller is monitoring XBot 1’s status, they could be used to trigger the event for ending XBot 2’s Wait Until command.