
This command is used to deactivate a Safety Sector by deactivating the flyways and XBots located within that Safety Sector.
An deactivated Safety Sector will have a fence built around it to block XBots from entering the deactivated Safety Sector.
Fieldbus Interface
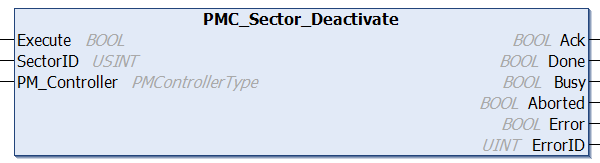
PMC_Sector_Deactivate
Ethernet Interface
PMCRTN SectorControl(int sectorID, SECTOROPERATION sectorOperation)
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
The specified Safety Sector is in the Operation, Activating, Active_Fenced, or Inactive_Fenced state. |
|
Postconditions |
The specified Safety Sector enters the Inactive_Fenced State.
|
Description
This command is used to deactivate a Safety Sector by deactivating the flyways and XBots located within that Safety Sector.
An deactivated Safety Sector will have a fence built around it to block XBots from entering the deactivated Safety Sector.
Typical workflow for powering off a Safety Sector that is currently on
-
Deactivate Safety Sector to deactivate XBots (if any) inside the Safety Sector and build a fence around the Safety Sector to prevent XBots from entering the Safety Sector
-
Get Safety Sector Status until it is in the "Inactive_Fenced" state, or wait for the Done signal of the previous "Deactivate Safety Sector" command
-
Turn off power to Flyways in the Sector