
This command is used to create the Star-Planet coupling.
Fieldbus Interface
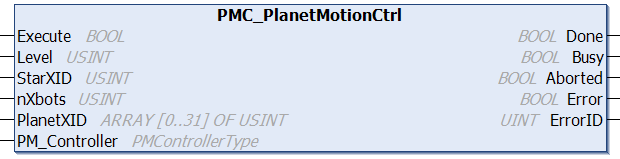
PMC_PlanetMotionCtrl
Ethernet Interface
PMCRTN EditPlanetXbots(int sunXbotID, int planetXbotCount, int[] planetXbotIDs, PLANETOPTIONS action)
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
XBot(s) State is Idle or Stopped. |
|
Postconditions |
The specified planet XBot(s) will start following the specified Star (or Sun) XBot |
Description
A planet motion command is a special type of connected Group, where a particular XBot is the Star or Sun XBot, and the other XBots (planets) move relative to the Star XBot. The planet XBot’s coordinate system’s origin is the Star XBot’s current position. This command is used to create the Star-Planet coupling.
Behaviour During Obstacles
Unlike standard XBots during motion commands, if any of the Star or Planet XBots encounter an obstacle (i.e. another XBot is in the way), they will all enter the Stopped State simultaneously and their motions will not be resumed even if the obstacle XBot is moved away. The motion commands need to be sent again.