This command is used to recover a specific XBot or all XBots after an accident.
Fieldbus Interface
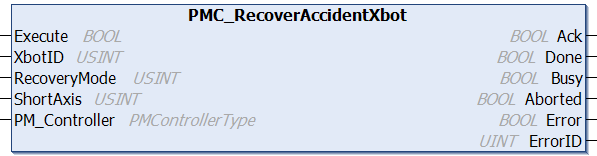
PMC_RecoverAccidentXbot
Inputs
Name
Data Type
Description
Execute
BOOL
Execution of the function block begins on a rising edge of this input.
XbotID
USINT
ID of the XBot. 0 = All XBots. Real XBot IDs [1,78]
RecoveryMode
USINT
0: Resume previous motion after recovery
1: Pause previous motion after recovery, but motion command is stored in motion buffer. Can be resumed (see Resume XBot )
2: Clear motion buffer after recovery
ShortAxis
USINT
PM_Controller
PMControllerType
Data structure that specifies which PMC to connect to. There should be only 1 instance of this variable for each connected PMC.
Outputs
Name
Data Type
Description
Ack
BOOL
Command has been accepted by the PMC when Ack = TRUE.
Done
BOOL
Execution successful. Function block is finished. (Note: Done will not become TRUE if Execute is already FALSE)
Busy
BOOL
Function block is active and must continue to be called.
Aborted
BOOL
Command aborted by another command.
Error
BOOL
If there is an error in processing the command, then Error = TRUE, otherwise, FALSE.
ErrorID
UINT
0x0: All OK. Otherwise, please see Fieldbus Reply Codes .
Ethernet Interface
PMCRTN RecoverAccidentXbot(int xbotID, RECOVERXBOTMODE mode = RECOVERXBOTMODE.RESUME, RECOVERXBOTOPTIONS option = RECOVERXBOTOPTIONS.DEFAULT)
Parameters
Name
Type
Description
xbotID
int
ID of the XBot. 0 = All XBots. Real XBot IDs [1,78]
mode
enum
RESUME (0): Resume previous motion after recovery
PAUSE (1): Pause previous motion after recovery, but motion command is stored in motion buffer. Can be resumed (see Resume XBot)
STOP (2): Clear motion buffer after recovery
option
enum
Returns
Name
Type
Description
PMCRTN
PMCRTN enum
ALLOK (0): Command Accepted. Otherwise, please see Ethernet Reply Codes .
Conditions
Operating Conditions
Preconditions
None
Postconditions
The accident barrier will be removed, and if the accident XBot is still inside the barrier and in deactivated state, the XBot will be activated and ready to accept command.
This command is used to recover a specific XBot (or all XBots at the same time) after an accident. After the recovery has completed, the XBot will take the shortest path back towards the original failure location so that it is back on the original path, then it will resume the previously programmed motions.