
Use this command to apply a force in a particular direction instead of maintaining/following a reference position.
Fieldbus Interface
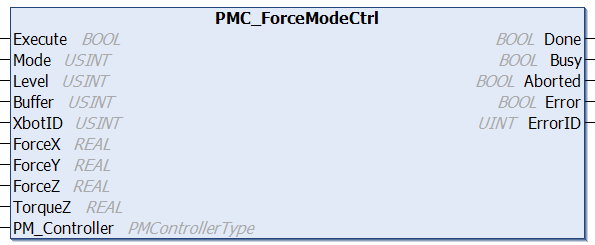
PMC_ForceModeCtrl
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
XBot is in the Idle state, Obstacle Detected state, Motion state, Stopped state, Hold Position state, or Waiting state. |
|
Postconditions |
The XBot will enter or exit Force Mode, as specified |
Description
Use this command to apply a force in a particular direction instead of maintaining/following a reference position.
The force command allows the user to apply a force in a chosen orientation, while disabling position control in that direction. While the XBot is in force mode, it is possible to move the XBot using the linear motion command as long as the axes affected by the motion command are not in force mode.
Force feedback is provide through the Get XBot Status command. See also Configure Feedback Stream and Read Xbot Force
Force mode command is specified by providing the X, Y, Z, RX, RY, RZ components of the desired force/torque. Currently, only X, Y, Z force component can be non-zero.
When entering force mode, the total Z force provided to the XBot is immediately changed to the value specified in the command. If the XBot is not externally constrained in the Z direction, then the XBot will begin to dive if the force provided is not enough to maintain the current XBot Z position, or the XBot will begin to shoot up if the force provided is higher than what is required to maintain the current XBot Z position.
The recommend procedure is:
-
Check the Z force feedback prior to entering Force Mode
-
Specify a Z force value in the force mode command close to the feedback value above, in order to achieve smooth motion during the switch from position mode to force mode
-
Once in force mode, additional force mode commands can be used to change the force according to application needs
When in Force Mode, if the XBot Z position exceeds 2mm, then it will automatically switch back to Position Mode with reference position Z = 2mm. Similarly, if the XBot Z position decreases below 1mm, then it will switch back to Position Mode with reference position Z = 1mm.
Behaviour During Obstacles
If Force Mode is enabled in Z only, the XBot will still be able to resume its motion in the event of an obstacle. Otherwise, the XBot will enter the Stopped State and its motion will not be resumed even if the obstacle XBot is moved away. The motion command needs to be sent again.
Changelog
PMC v11687 - added Buffer Input option