
This command can be used to stop the PMC from controlling the XBots. The PMC will no longer control the position of the XBots. It is important to make sure the XBots will come to rest in a safe manner prior to deactivating the PMC.
When the PMC is deactivated, it is safe to add or remove XBots from the Flyways.
See also: Activation
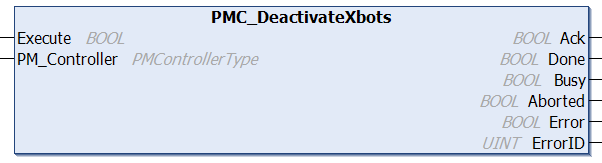
Fieldbus Interface
PMC_DeactivateXbots
Ethernet Interface
PMCRTN DeactivateXBOTS()
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
PMC State is OPERATIONAL. |
|
Postconditions |
PMC State goes into DEACTIVATING, then INACTIVE. XBots will stop being controlled by the PMC. |
Description
This command can be used to stop the PMC from controlling the XBots. The PMC will no longer control the position of the XBots. It is important to make sure the XBots will come to rest in a safe manner prior to deactivating the PMC.
When the PMC is deactivated, it is safe to add or remove XBots from the Flyways.