
When using Real-Time Ethernet to connect to the system, each feedback frame update packet from the PMC to the Host Controller can provide detailed information for up to 24 XBots. This command is used to edit which XBots are included in the frame update. See also Feedback Configuration
The feedback positions or forces are read using the Read Stream Feedback command.
Fieldbus Interface
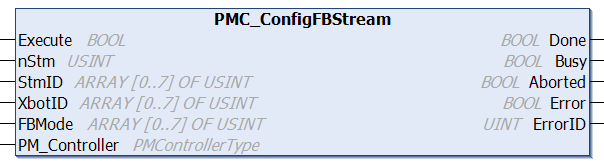
PMC_ConfigFBStream
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
None |
|
Postconditions |
The Real-Time Ethernet frame data will be updated to provide the desired information |
Description
When using Real-Time Ethernet to connect to the system, each feedback frame update packet from the PMC to the Host Controller can provide detailed information for up to 24 XBots. This command is used to edit which XBots are included in the frame update. See also Feedback Configuration.
This information will be provided in the up to 24 available slots in the feedback frame update packet. Each slot has a ID, this ID is referred to as the stream ID.
This command is used to specify which XBots the PMC should provide information for, and in which feedback frame slot. The user can choose from 2 types of feedback data: position or force. If position is selected, that feedback frame slot will only provide position data. Similarly, if force is selected, that feedback frame slot will be used to provide force data.
The number of available slots depends on how many axis are provided in each slot. If only 2 axes (minimum) is selected, then 24 slots are available. If 6 axes (maximum) are selected, then 8 slots are available. i.e. # of axis * # of slots <= 49.