Library Setup
Setup Fieldbus
Step 1: Open the Acontis EC-Engineer program
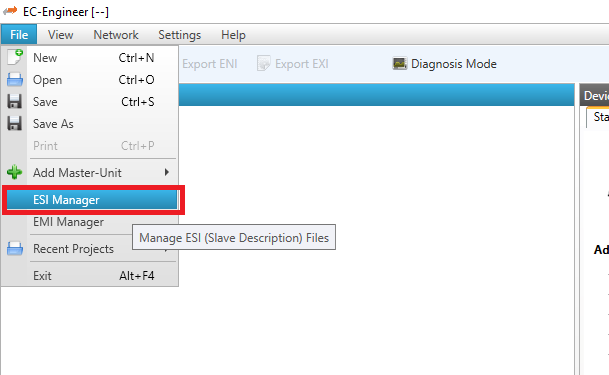
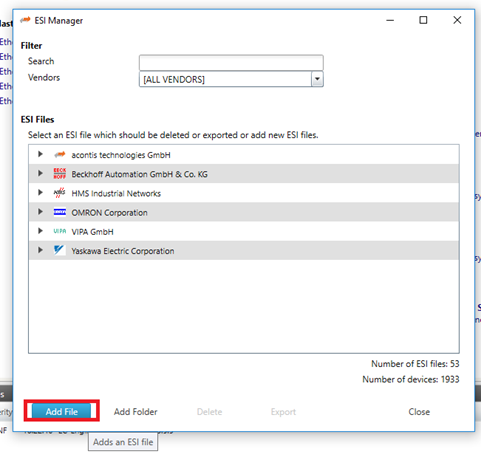
Step 2: Click File->ESI Manager
Step 3: In the ESI Manager click the Add File button
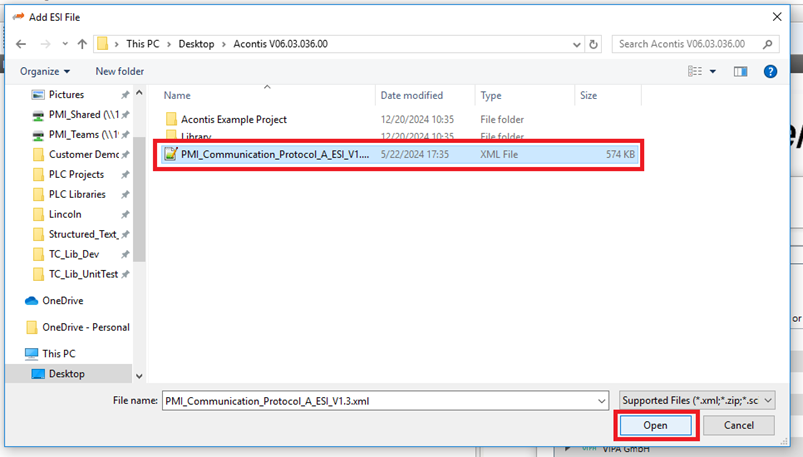
Step 4: In the Add ESI File window select the PMC ESI file and click Open
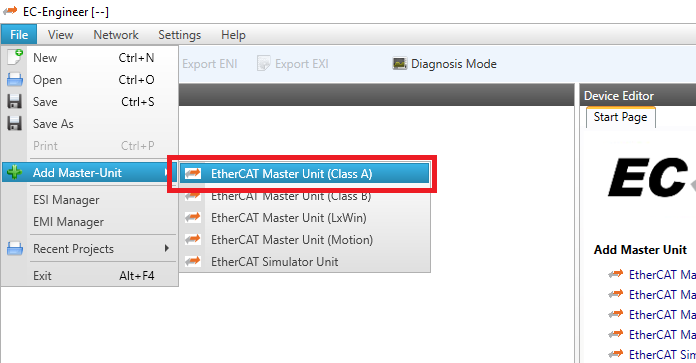
Step 5: Click File->Add Master-Unit->EtherCAT Master Unit (Class A)
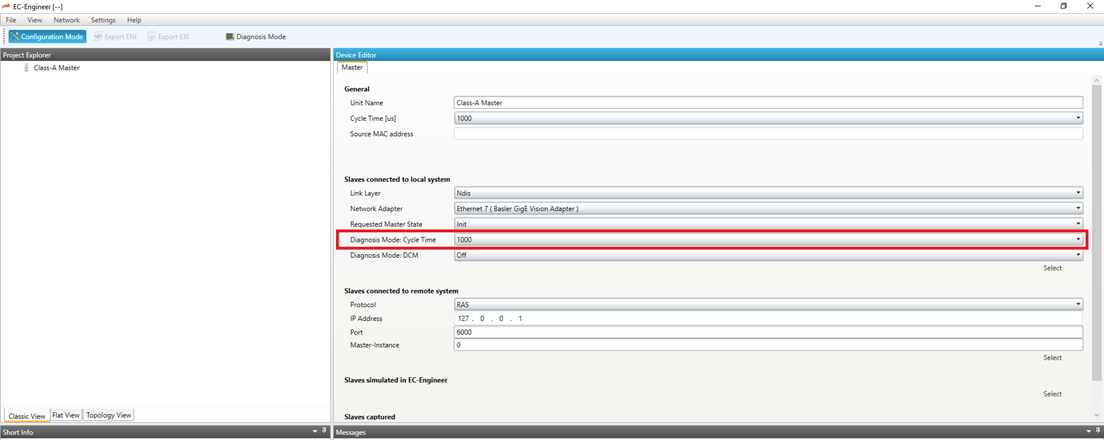
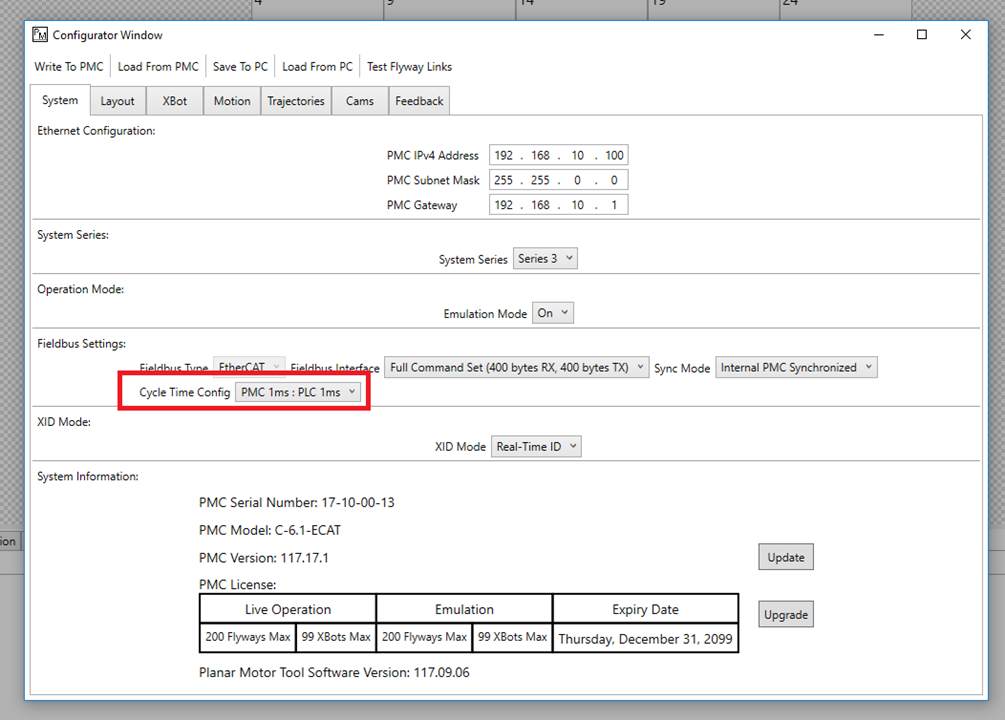
Step 6: Make sure that the Class-A Master’s Cycle Time matches the Cycle Time Config in the Planar Motor Tool
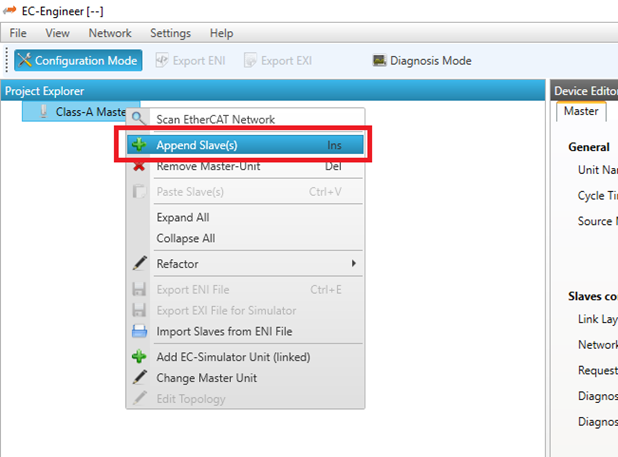
Step 7: Right click on the Class-A Master and click Append Slave(s)
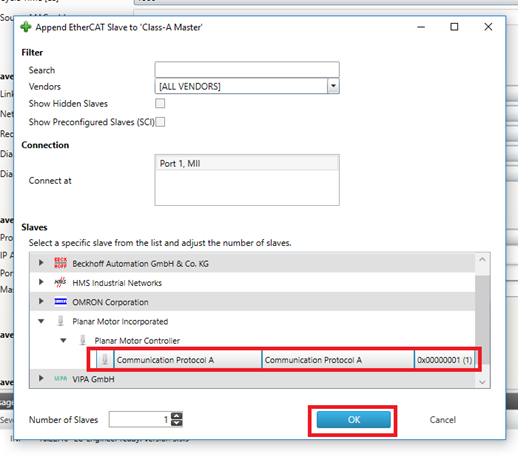
Step 8: Select the Planar Motor Incorporated->Planar Motor Controller->Communication Protocol A and click OK
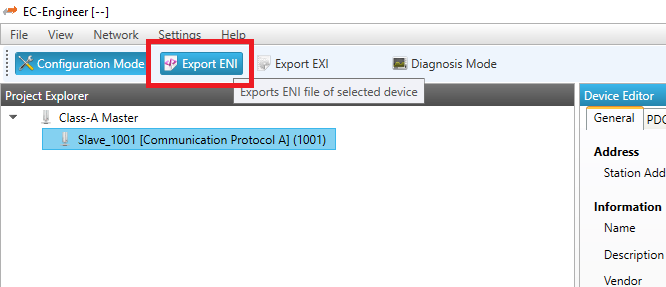
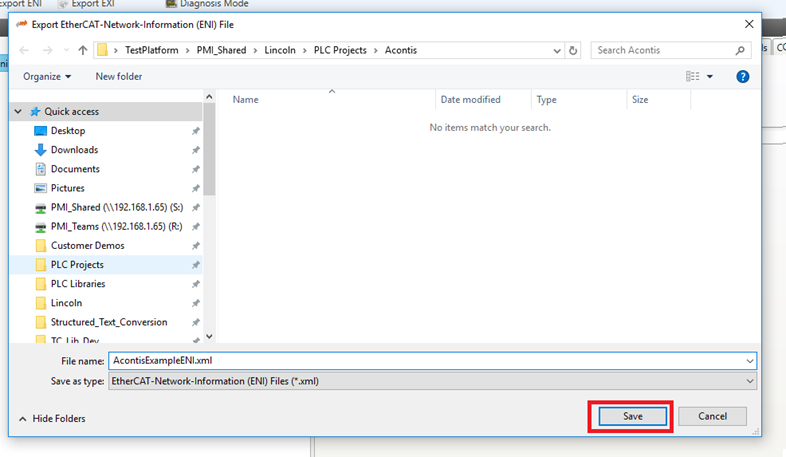
Step 9: Then click Export ENI
Step 10: Give the ENI XML file an unique name and click Save
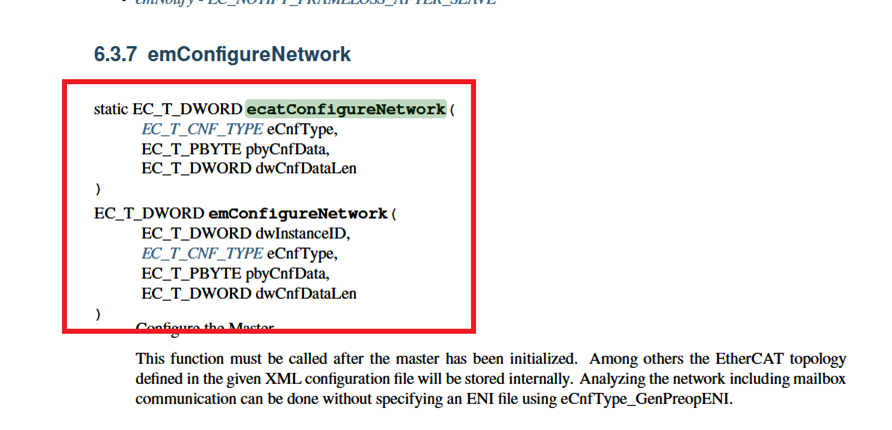
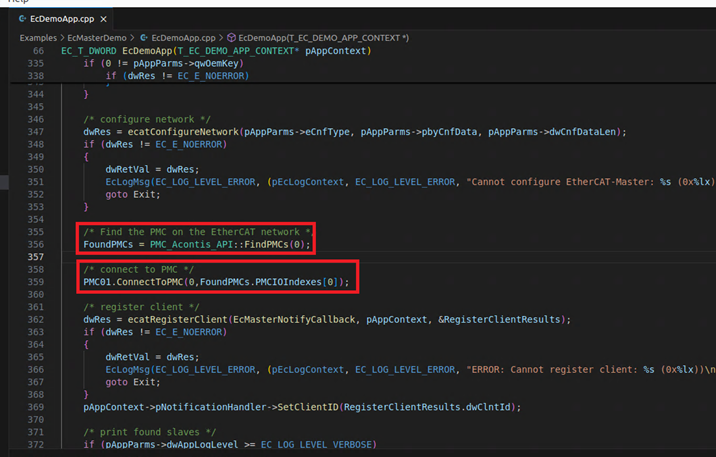
Step 11: In the Acontis library the ENI file is loaded by the ConfigureNetwork function
Import and use library
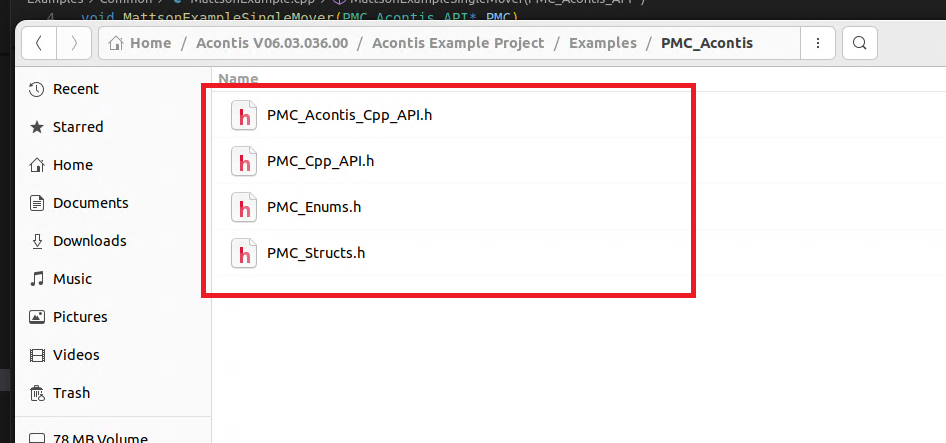
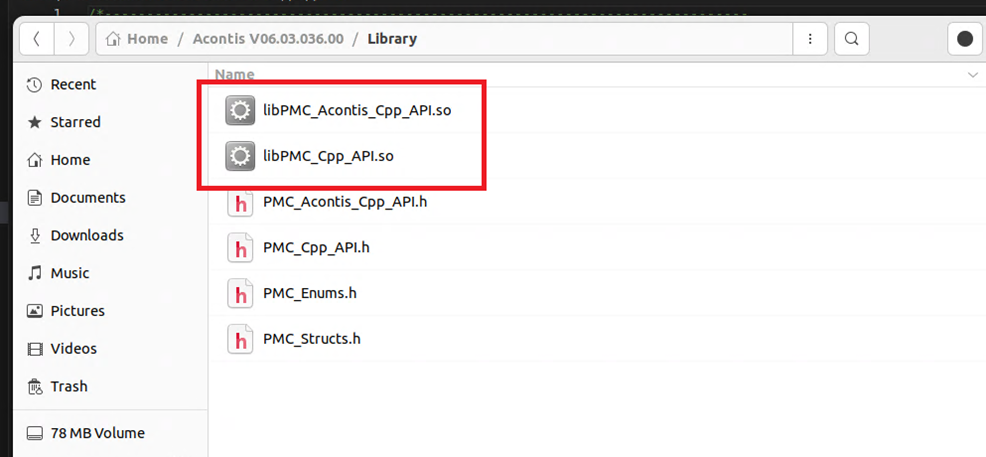
Step 1: Navigate to the location of the four header files in the library (PMC_Enums.h, PMC_Structs.h, PMC_Cpp_API.h, PMC_Acontis_Cpp_API.h)
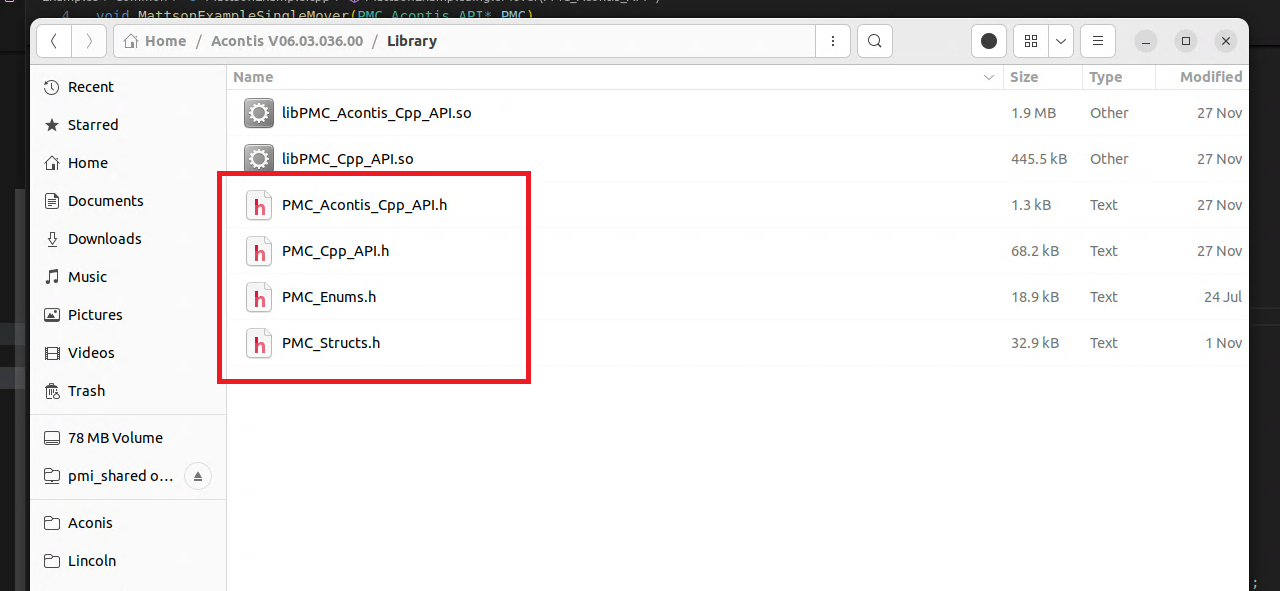
Step 2: Copy the four header files into the project workspace
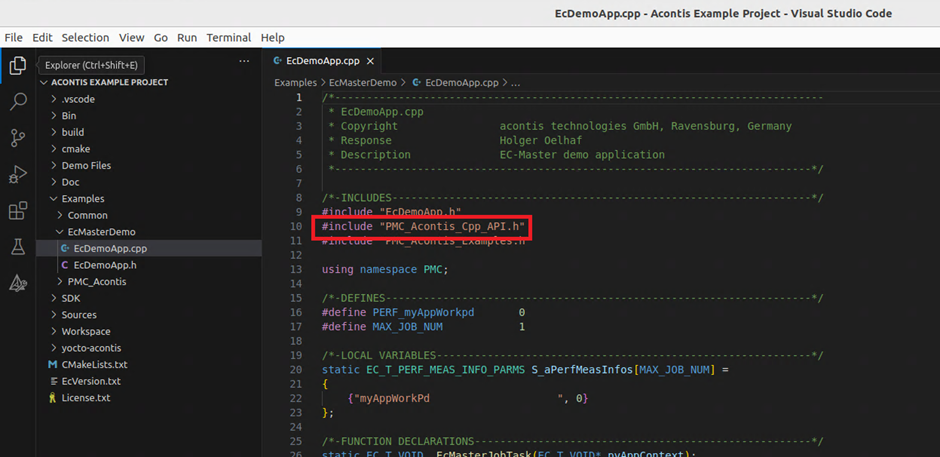
Step 3: Include PMC_Acontis_Cpp_API.h in the project
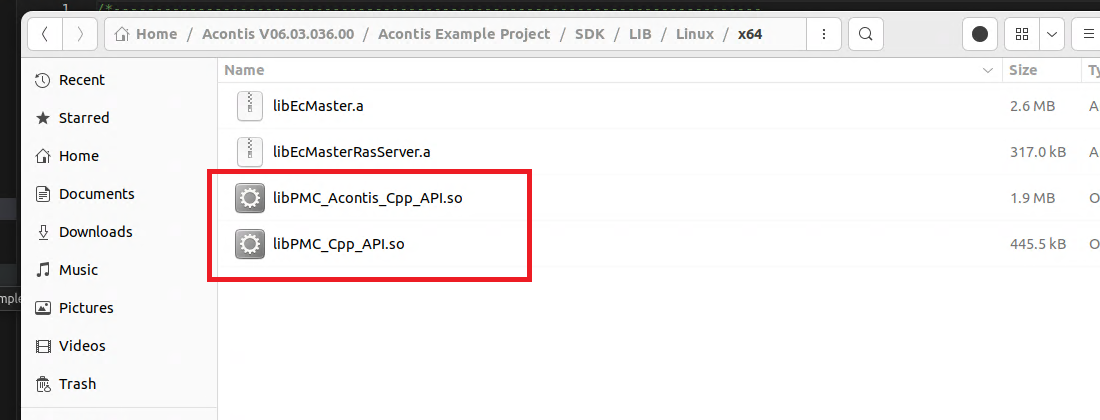
Step 4: Then take the libPMC_Cpp_API.so and libPMC_Acontis_Cpp_API.so files
Step 5: And put them into the project workspace
Step 6: To use the library either
-
Add
target_include_directory(${AppName} PRIVATE ${path/to/headers})andtarget_link_libraries(${AppName} PRIVATE ${path/to/.so})to the CMakeList script compiling, or -
Include the header and library manually in the build CLI. i.e.
g++ ... -I/path/to/headers -L/path/to/.so/
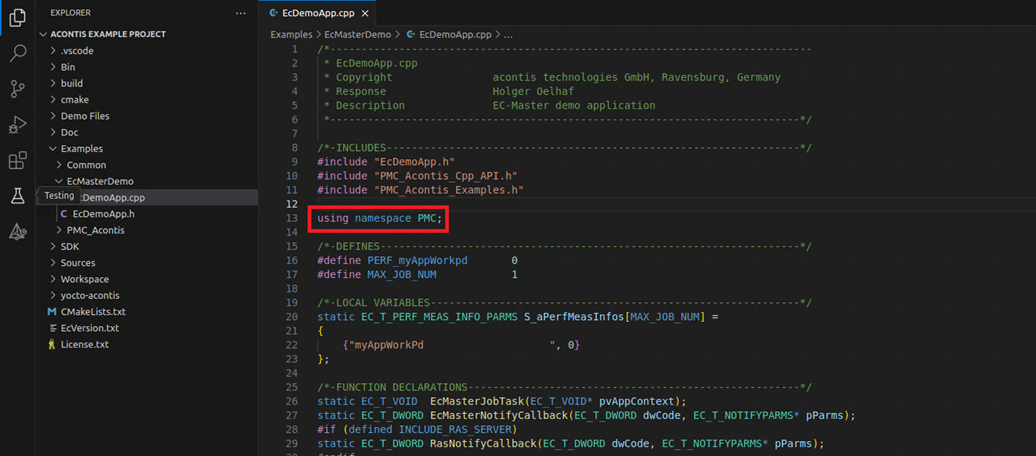
Step 7: It is advised to add using namespace PMC; to the project so that you don’t have to add PMC:: in front of all PMC function calls and variable declarations
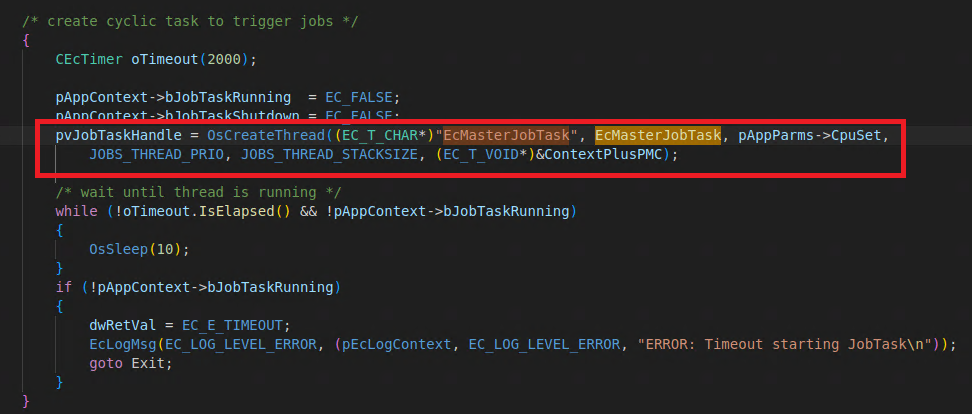
Step 8: When using the PMC library, ConnectToPMC must be called after calling ecatConfigureNetwork prior to using the rest of the library
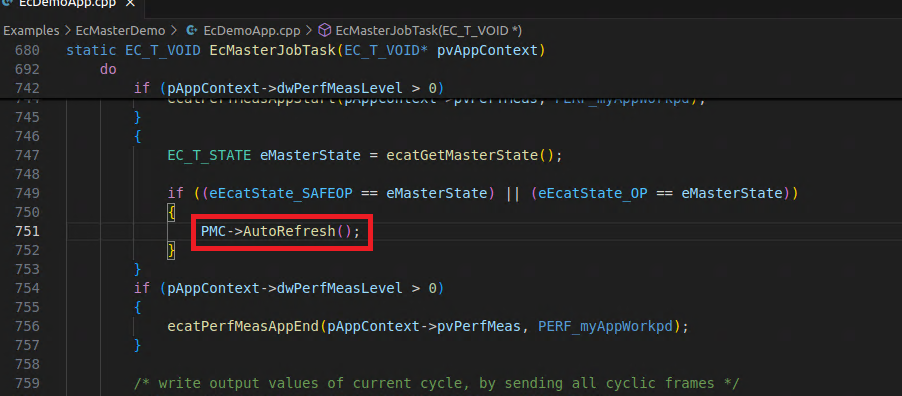
Step 9: AutoRefresh needs to be called regularly at the same rate as the EtherCAT bus. It is recommended to spin up a separate thread to handle this task