|
Name
|
Data Type
|
Description
|
|
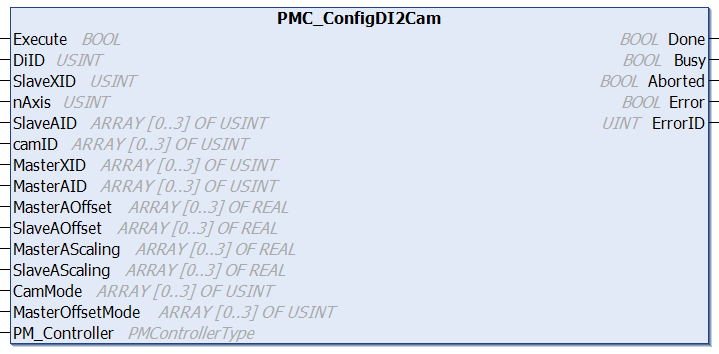
Execute
|
BOOL
|
Execution of the function block begins on a rising edge of this input. |
|
DiID
|
USINT[0..21]
|
Digital Input ID, valid range [1,128] |
|
SlaveXID
|
USINT
|
ID of the XBot. Real XBot IDs [1,78]. Virtual XBot IDs [100,127]
|
|
nAxis
|
USINT
|
# of slave axis specified in this command (all for the same slave XBot)
|
|
SlaveAID
|
USINT[0..3]
|
Array of size 4, enter up to 4 axis of the slave XBot to control. Axid IDs: 0 = no axis, 1 = X, 2 = Y, 3 = Z, 4 = RX, 5 = RY, 6 = RZ
|
|
camID
|
USINT[0..3]
|
Array of size 4, ID of the cam used to drive the slave axis
|
|
MasterXID
|
USINT[0..3]
|
Array of size 4, ID of the Master XBots
|
|
MasterAID
|
USINT[0..3]
|
Array of size 4, axis ID of the master XBot axis that is used to drive the slave xbot axis. Axid IDs: 0 = no axis, 1 = X, 2 = Y, 3 = Z, 4 = RX, 5 = RY, 6 = RZ
|
|
MasterAOffset
|
REAL[0..3]
|
Array of size 4, offset of each master axis in meters (m)
|
|
SlaveAOffset
|
REAL[0..3]
|
Array of size 4, offset of each slave axis in meters (m)
|
|
MasterAScaling
|
REAL[0..3]
|
Array of size 4, scalling factor of each master axis, positive value only
|
|
SlaveAScaling
|
REAL[0..3]
|
Array of size 4, scalling factor of each slave axis, positive value only
|
|
CamMode
|
USINT[0..3]
|
Array of size 4, cam mode of each axis Cam modes: 0 = auto start, 1 = cyclic, 2 = start once
|
|
MasterOffsetMode
|
USINT[0..3]
|
Array of size 4, master offset mode of each axis Master offset modes: 0 = absolute, 1 = relative
|
|
PM_Controller
|
PMControllerType
|
Data structure that specifies which PMC to connect to. There should be only 1 instance of this variable for each connected PMC. |