
Control (up to) all 6 axis of the XBot using a reference stream of position points. This is only possible using Real-time Ethernet communication protocols. See also Feedback Configuration.
This command is used to start the streaming motion, further position updates are provided using the Write to Stream command.
Fieldbus Interface
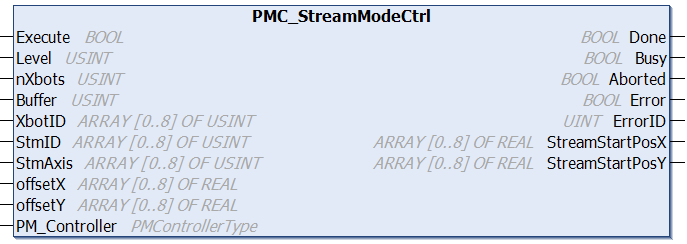
PMC_StreamModeCtrl
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
|
|
Postconditions |
The specified XBot(s) will enter the Motion State. |
Description
It is possible to control all 6 axes of the XBot using an external reference stream of position points. This is only possible using Real-time Ethernet communication protocols.
The streaming reference position of the XBot is relative to the XBot’s reference position when this command is executed.
When linking an XBot to a stream, you may specify which XBot axis should follow the stream values. XBot axis that do not follow stream values will maintain their initial positions and ignore any data in the stream. Turn on a stream axis by setting the corresponding bit to 1 in StmAxis.
|
Bit 7 |
Bit 6 |
Bit 5 |
Bit 4 |
Bit 3 |
Bit 2 |
Bit 1 |
Bit 0 |
|---|---|---|---|---|---|---|---|
|
Reserved (0) |
Reserved (0) |
RZ |
RY |
RX |
Z |
Y |
X |
-
The stream of position points is provided to the PMC in the communication packet from the user controller to the PMC. These position points can be provided at the update interval of the communication protocol. (Typically 1 millisecond)
-
A stream can be used to drive multiple XBots
-
Incoming stream data must abide by the acceleration limits. Streams that exceed these limits will not be applied to the XBots and the XBots will stop
Changelog
PMC v117.17.43 - Moved X and Y offsets from input to the output
PMC v117.20.40 - Added X and Y offsets back to the input to prevent breaking changes
PMC v117.20.49 - Added Buffer to optionally add the stream control to the XBot’s motion buffer