Use this command to inject a sinusoidal signal to the XBot, with configurable parameters including delayed starts for each axis. Note that this command does not have any effect on the XBot in Emulation mode; a real system needs to be used.
Fieldbus Interface
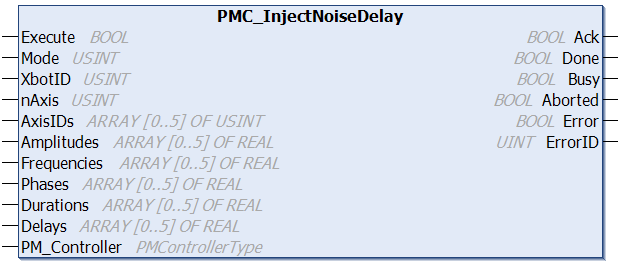
PMC_InjectNoiseDelay
Inputs
Name
Data Type
Description
Execute
BOOL
Execution of the function block begins on a rising edge of this input.
Mode
USINT
0: turn off noise; 1: turn on noise (force mode), 2: turn on noise (position mode)
The XBot will vibrate according to the parameters entered
Description
Use this command to inject a sinusoidal signal to the XBot, with configurable parameters including delayed starts for each axis. Note that this command does not have any effect on the XBot in Emulation mode; a real system needs to be used.
Changelog
PMC v117.22.55 (Ethernet v117.12.02) - Command released in .NET library
PMC v117.25.53 (Fieldbus v6.03.053.00) - Added position mode