
Use this command to weigh the payload carried by the XBot. This command does not provide a reply immediately, but calculates the weight of the payload for the specified duration. It is a wrapper function for Weigh XBot, which uses ReturnType 1 and 2 and does not block the fieldbus.
Fieldbus Interface
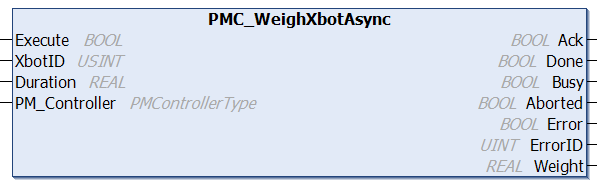
PMC_WeighXbotAsync
Ethernet Interface
PMCRTN StartXbotWeighing(int xbotID, float wTime)
PayloadWeighingReturn GetXbotWeighing(int xbotID)
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
XBot is in the Idle or Waiting State, at a consistent location |
|
Postconditions |
The measured payload is provided in the output |
Description
Use this command to weigh the payload carried by the XBot. This command does not provide a reply immediately, but calculates the weight of the payload for the specified duration. It is a wrapper function for Weigh XBot, which uses ReturnType 1 and 2 and does not block the fieldbus.
This command is more repeatable than Payload Weighing, but takes longer to complete.
It is possible to weigh the payload carried by the XBot using the Weigh Xbot command. The resolution is 0.1g, the repeatability is about 0.2g, and accuracy depends on the calibration. Weighing should be completed with Z = 1mm, Rx = Ry = Rz = 0.
The weighing output is position dependent, to get meaningful results, it is best to always do the weighing from the same position. For all XBots, position it so that 2 edges of the XBot are aligned with 2 edges of the Flyway. For example, for M3-06 (120mm x 120mm), the positions that will provide the most accurate weighing result is at the 4 corners of the Flyway: (X,Y) = (60mm,60mm), (60mm,180mm), (180mm,60mm) and (180mm,180mm).
Changelog
PMC v117.26.45 (Ethernet v117.15.01) - Command released in .NET library