This command is used to translate a group of XBots together.
Fieldbus Interface
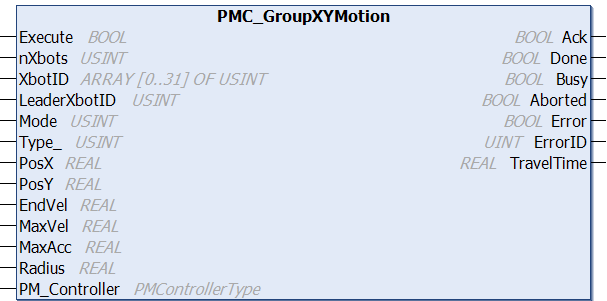
PMC_GroupXYMotion
Inputs
|
Name
|
Data Type
|
Description
|
|
Execute
|
BOOL
|
Execution of the function block begins on a rising edge of this input. |
|
nXbots
|
USINT
|
Number of XBots to group and move (up to 32)
|
|
XbotID
|
USINT[0..31]
|
XBot IDs
|
|
LeaderXbotID
|
USINT
|
XBot to be sent to target position
|
|
Mode
|
USINT
|
0: Absolute Position. 1: Relative Positioning
|
|
Type_
|
USINT
|
0: Direct path to target. 1: X first, then Y. 2: Y first, then X
|
|
PosX
|
REAL
|
|
|
PosY
|
REAL
|
|
|
EndVel
|
REAL
|
Ending Speed (m/s)
|
|
MaxVel
|
REAL
|
Maximum Speed (m/s)
|
|
MaxAcc
|
REAL
|
Maximum Acceleration (m/s2)
|
|
Radius
|
REAL
|
Turn Radius (m), if Type_ is 1 or 2
|
|
PM_Controller
|
PMControllerType
|
Data structure that specifies which PMC to connect to. There should be only 1 instance of this variable for each connected PMC. |
Outputs
|
Name
|
Data Type
|
Description
|
|
Ack
|
BOOL
|
Command has been accepted by the PMC when Ack = TRUE. |
|
Done
|
BOOL
|
Execution successful. Function block is finished. (Note: Done will not become TRUE if Execute is already FALSE) |
|
Busy
|
BOOL
|
Function block is active and must continue to be called. |
|
Aborted
|
BOOL
|
Command aborted by another command. |
|
Error
|
BOOL
|
If there is an error in processing the command, then Error = TRUE, otherwise, FALSE. |
|
ErrorID
|
UINT
|
0x0: All OK. Otherwise, please see Fieldbus Reply Codes. |
|
TravelTime
|
REAL
|
Time needed for the motion to complete in seconds.
|
Conditions
|
Operating Conditions
|
|
Preconditions
|
XBot(s) State is Idle or Stopped. |
|
Postconditions
|
The specified XBot(s) will enter the Motion State. |
Description
This command is used to translate a group of XBots together. It is equivalent to these commands, sent one after the other:
-
Create XBot Group with nXbots and XbotID
-
Bond XBot Group
-
Move LeaderXbotID with XY Motion, using all the relevant parameters
-
Delete XBot Group