
After the system is powered up initially, the XBots are disabled (not held in place by the system), and their positions are not controlled by the PMC. Use this command to begin controlling the XBots, the XBots will become levitated and controlled by the PMC.
In Absolute ID mode, keep-out and keep-in zones can be defined prior to Activation to ensure that XBots do not enter these areas, or stay in these areas respectively. See XBot ID Management for more details.
See also: Deactivation
Fieldbus Interface
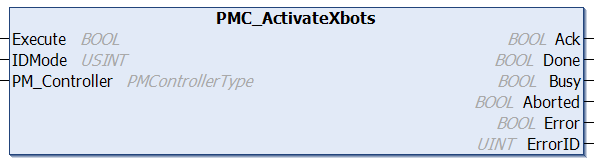
PMC_ActivateXbots
Ethernet Interface
PMCRTN ActivateXBOTS(ACTIVATIONMODE mode = ACTIVATIONMODE.AUTOSCAN)
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
PMC State is INACTIVE or ERROR. XBots not controlled by the PMC. |
|
Postconditions |
PMC State goes into ACTIVATING, then OPERATIONAL. XBots are levitated. |
Description
After the system is powered up initially, the XBots are disabled (not held in place by the system), and their positions are not controlled by the PMC. Use this command to begin controlling the XBots, the XBots will become levitated and controlled by the PMC.
In Absolute ID mode, keep-out and keep-in zones can be defined prior to Activation to ensure that XBots do not enter these areas, or stay in these areas respectively. See XBot ID Management for more details.
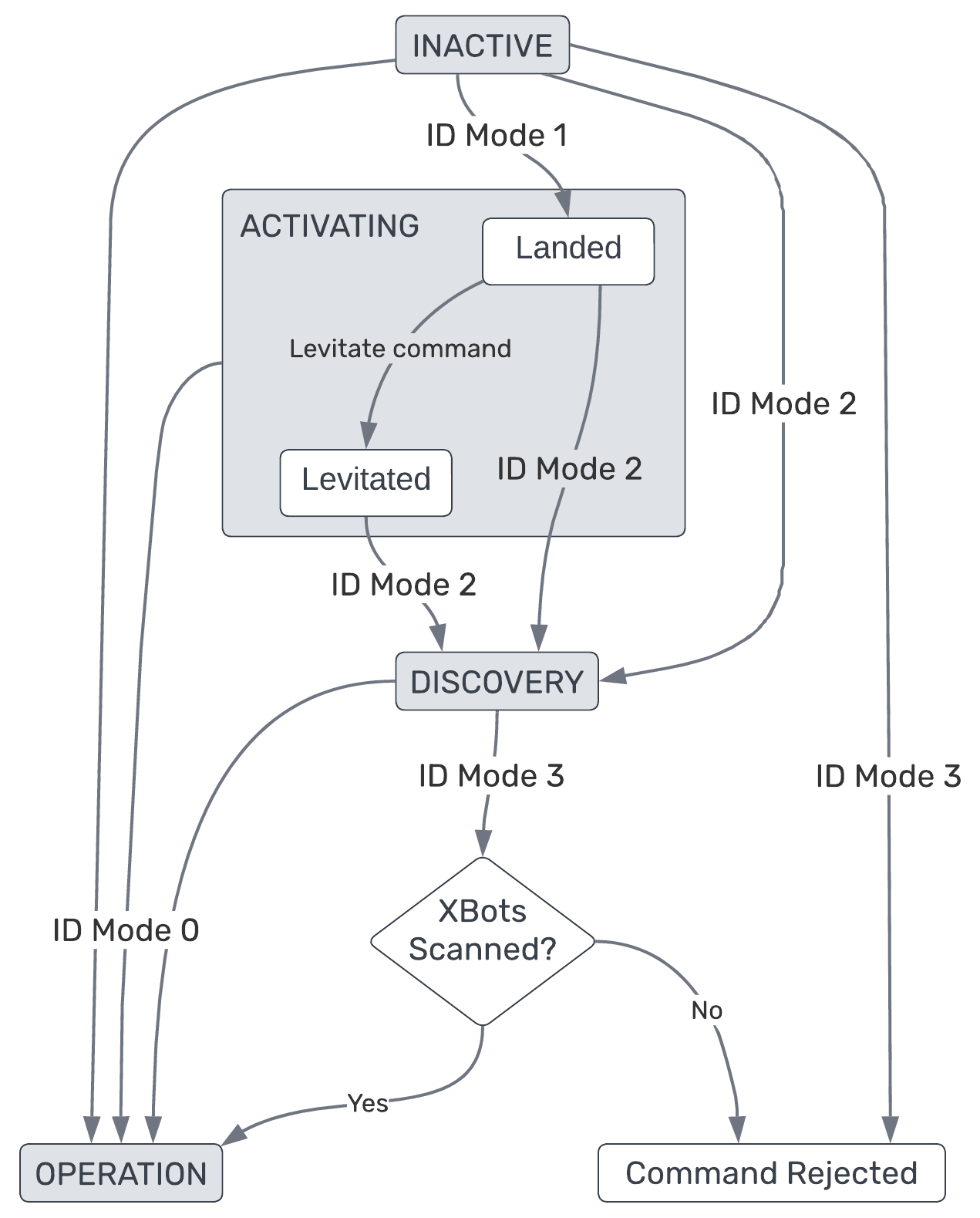
The input ID Mode is used to select the Activation behaviour in Absolute ID mode:
0: full auto
XBots will levitate and automatically start scanning for XID. During activation, the PMC will enter the ACTIVATING state from INACTIVE or ERROR, and go through the DISCOVERY state while scanning. After successful scan, the PMC will enter the OPERATION state, and the XBots will be levitated and controlled by the PMC. If the scan is unsuccessful, the PMC will go back to INACTIVE.
This ID Mode can be called at any point in the Activation process to automatically complete the remaining steps.
1: activate to landed state
XBots will activate (will now be controlled by the PMC), but stay in the Landed state. The PMC will enter and stay in the ACTIVATING state. Use ID Mode 2 to automatically levitate the XBots and enter DISCOVERY state. Alternatively, the Levitate command can be used to manually levitate the XBots (the PMC will still be in ACTIVATING state) and then use ID Mode 2 to enter DISCOVERY state.
2: activate to discovery mode
XBots will levitate and PMC will enter and stay in DISCOVERY state. Use Mover ID Auto Scan to perform XID scan in pre-defined zones individually or the whole system. If the scans are successful, this mode is exited using ID Mode 3 (see below). If the scans are unsuccessful, use the Deactivate command to bring the PMC back to INACTIVE.
3: exit discovery mode
This ID Mode is used to exit the DISCOVERY state and go to OPERATION, only after all the XBots are successfully scanned.
Changelog
PMC v117.8.7 - Added ModeID 2: the user can now boot up the PMC in manual mode, which levitates the XBots, but does not perform the XID Scan in Absolute ID Mode
PMC v117.10.15 - Added ModeID 1: the user can now boot up the PMC in manual mode, but the XBots are still landed
PMC v117.22.55 (Ethernet v117.12.02) - Added mode input