
This command queries the PMC for information for a particular XBot.
Fieldbus Interface
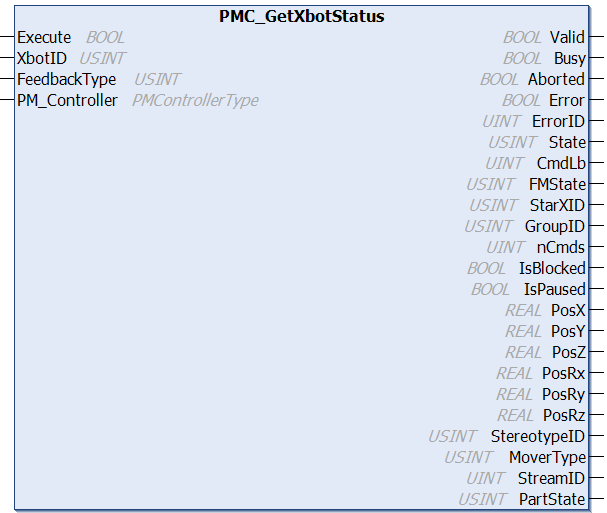
PMC_GetXbotStatus
Ethernet Interface
XBotStatus GetXBotStatus(int xbotID, FEEDBACKOPTION feedbackType)
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
None |
|
Postconditions |
The specified XBot's status information is provided in the outputs. |
Description
This command queries the PMC for the following information for a particular XBot:
-
6DOF position (X, Y, Z, RX, RY, RZ) in meters and radians or 6D Force/Torque, in N and Nm
-
XBot State, see XBot State Description
-
Command Label of the command that the XBot is currently executing. If not applicable (e.g. XBot is idle or in async motion), then the returned value will be 0xFFFF
-
Force Mode state (In force mode or not in force mode) for each axis (X, Y, Z, RX, RY, RZ)
-
XBot Motion Buffer state and number of commands in the buffer
-
XBot Group ID that XBot is linked/connected to, if applicable.
-
Planet XBots Control Star XBot ID, if applicable.
-
Motion Interrupt status
-
Assigned Mover Stereotype ID. Default value is 255.
-
Mover Types of the specified XBot.
-
Stream ID that the specified XBot is following.
-
Part State of the specified XBot.
Changelog
PMC v117.20.49 - Added Part State and Stream ID to the output