
Configure a digital output from the PMC to turn on/off based on XBot Force. See also Read Digital Output from PMC.
-
State based – On when force exceeds threshold, off when force is less than the threshold
-
Event based – On when monitored force exceeding threshold, or on when monitored force falling below threshold. It can be turned off using a Digital Input, see Configure Digital Input To Reset DO
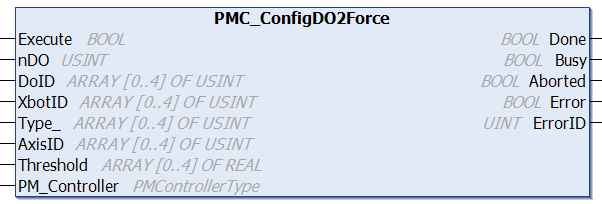
Fieldbus Interface
PMC_ConfigDO2Force
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
None |
|
Postconditions |
Specified Digital Output from PMC is set to monitor the force of the specified XBots |
Description
Configure a digital output from the PMC to turn on/off based on XBot Force. See Read Digital Output from PMC
-
State based – On when force exceeds threshold, off when force is less than the threshold
-
Event based – On monitored force exceeding threshold, or on monitored force falling below threshold. It can be turned off using a Digital Input, see Configure Digital Input To Reset DO