
This command will reboot the Planar Motor Controller (PMC)
Fieldbus Interface
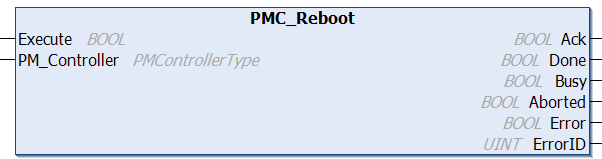
PMC_Reboot
Ethernet Interface
PMCRTN RebootPMC(int mode = 0)
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
None |
|
Postconditions |
PMC will begin the reboot process |
Description
The planar motor controller will be rebooted. The reboot process will:
-
Cause all XBots controlled by the PMC to become deactivated/inactive
-
Reload configuration parameters
-
Clear PMC errors
-
Reset the PMC to the Inactive state after it is done rebooting
This command should be used:
-
After programming new PMC configuration settings through the Planar Motor Tool GUI (PMT). The PMT automatically reboots the PMC
-
Upon encountering a PMC error and determining its cause
Changelog
PMC v117.17.35 - Added mode to the Ethernet Interface, which allows the user to choose a warm or cold reboot