
Jogging can be used to adjust all the degrees of freedom of an XBot manually. The XBot can be in most states (motion, idle, stopped, obstacle…), but its motion buffer will be cleared once it is jogged. If you jogged an XBot in front of a moving XBot, the moving XBot will stop the motion and transition to obstacle state until you move the jogging XBot away.
To use jogging feature:
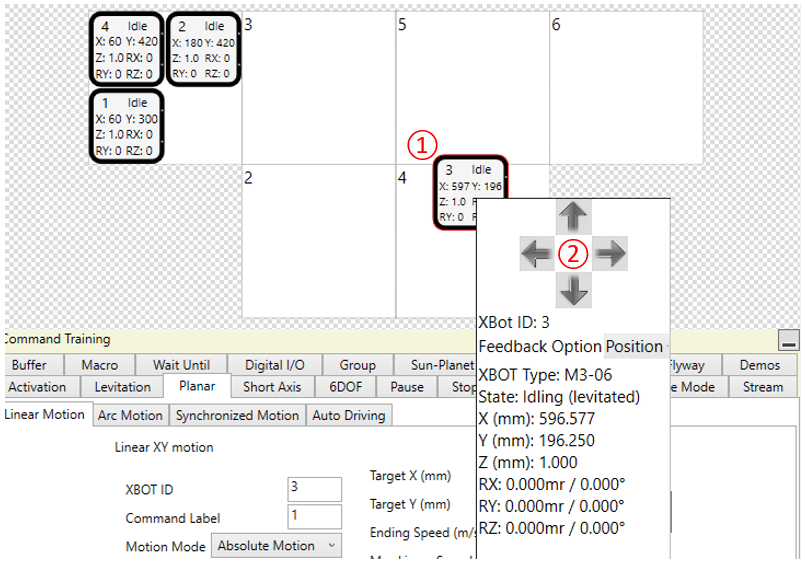
① Click on the XBot you want to jog
② A window will show up containing 4 arrows and the status of XBot; click and hold any one of the arrows to move XBot toward that direction, release your click to stop the XBot