
This command is used to make an XBot follow a user-defined trajectory, with all 6 axis specified, along with an optional axis that can be specified to control the Digital Output from the controller.
For writing a trajectory into the system, see Trajectory Configuration.
See also Save Trajectory, Read Trajectory Hash, Delete Trajectory
Fieldbus Interface
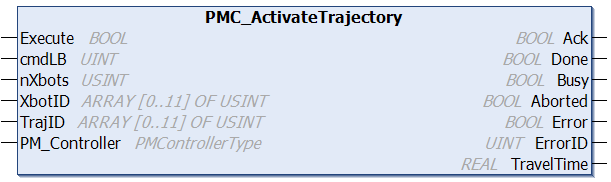
PMC_ActivateTrajectory
Ethernet Interface
PMCRTN TrajectoryActivation(ushort cmdLabel, int xbotCount, int[] xbotIDs, int[] trajectoryIDs)
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
XBot(s) State is Idle or Stopped. |
|
Postconditions |
The specified XBot(s) will enter the Motion State. |
Description
This command is used to make an XBots follow a user-defined trajectory, with all 6 axis specified, along with an optional axis that can be specified to control the Digital Output from the controller.
For writing a trajectory into the system, see Trajectory Configuration.
-
The XBot will directly follow the trajectory provided by the file, therefore it is important to keep the speed and acceleration within the specified limits when generating the trajectory
-
The temporal interval of trajectory can be from 1 [ms] to 10000 [ms], it does not need to be an integer
-
Trajectory points are relative positions to the starting point of the XBot
Behaviour During Obstacles
If an XBot encounters an obstacle (i.e. another XBot is in the way) while following a trajectory, it will stop and go back to the Idle State. Its motion will not be resumed even if the obstacle XBot is moved away.