
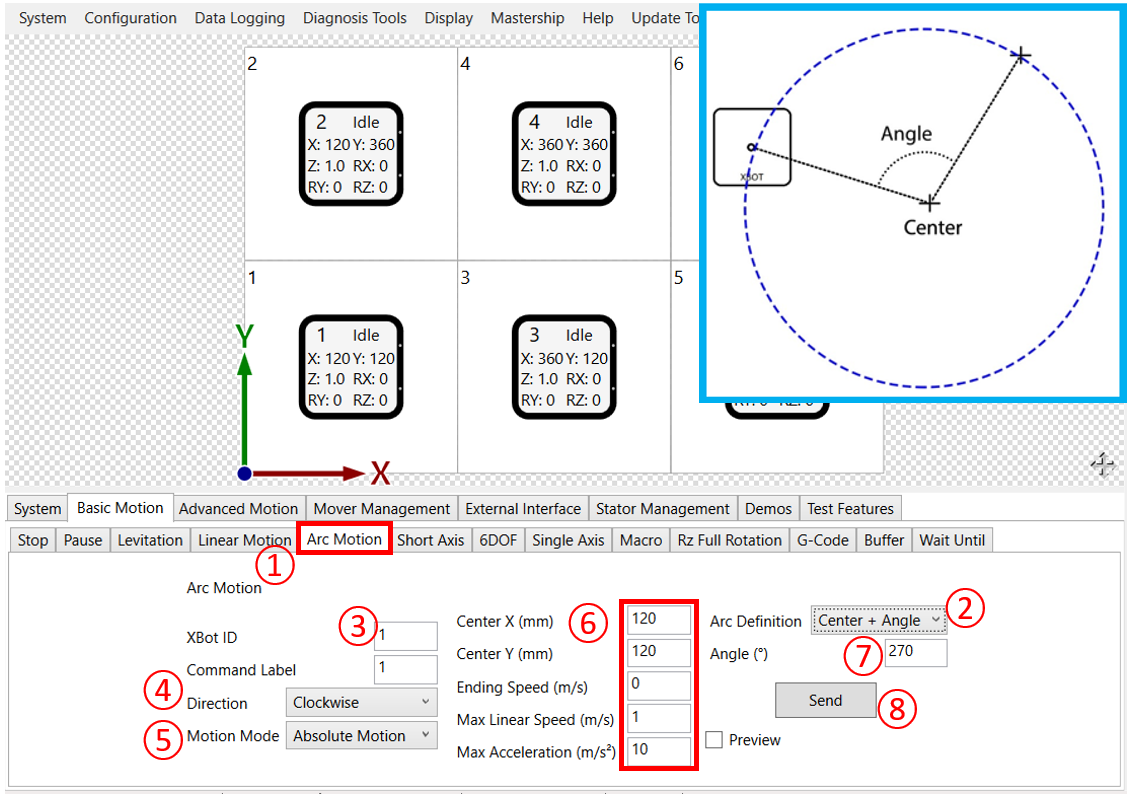
① Click the Basic Motion \ Arc Motion tab
② Choose Center + Angle
③ Enter the XBot ID
④ Choose Clockwise or Counter-Clockwise
⑤ Absolute means the target position is definite in absolute coordinates
⑥ Enter motion parameters
⑦ Enter the angle of rotation
⑧ Click “Send” when ready
Note:
-
The acceleration limit considers both the normal and tangential acceleration experienced by the XBot during the motion. If either exceeds the limit specified here, the max speed will be throttled to meet the acceleration limit.