
This command is used to activate a Safety Sector by activating the Flyways located within that Safety Sector.
An activated Safety Sector will have a fence built around it to block XBots from entering or leaving the Safety Sector until the Recover Safety Sector command is called.
Auto Driving and Auto Driving Velocity commands cannot be used in an Active_Fenced Safety Sector.
Fieldbus Interface
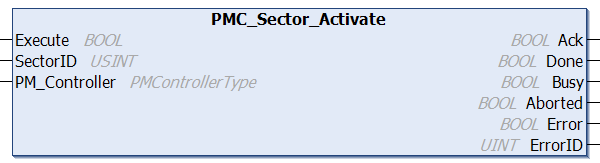
PMC_Sector_Activate
Ethernet Interface
PMCRTN SectorControl(int sectorID, SECTOROPERATION sectorOperation)
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
The specified Safety Sector is in the Inactive state.
|
|
Postconditions |
The specified Safety Sector enters the Activating state.
|
Description
This command is used to activate a Safety Sector by activating the Flyways located within that Safety Sector.
An activated Safety Sector will have a fence built around it to block XBots from entering or leaving the Safety Sector until the Recover Safety Sector command is called.
Auto Driving and Auto Driving Velocity commands cannot be used in an Active_Fenced Safety Sector.
Typical workflow for powering up a Safety Sector that is currently off
-
Turn on power to Flyways in the Sector.
-
Get Safety Sector Status until it is in the "Inactive_Fenced" state.
-
Activate Safety Sector to activate Flyways and xbots inside the Safety Sector.
-
Get Safety Sector Status until it is in the "Active_Fenced" state.
-
Recover Safety Sector to remove the fence around the Safety Sector.
Changelog
PMC v117.26.45 (Ethernet v117.15.01) - Added more enum options to .NET library