
This command is used to notify the PMC that the loading zone is clear and ready for the next XBot to be loaded.
Fieldbus Interface
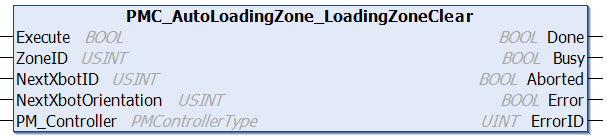
PMC_AutoLoadingZone_LoadingZoneClear
Ethernet Interface
PMCRTN SetAutoLoadingZoneEmpty(int autoLoadingZoneID)
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
The specified Auto Loading Zone is defined as a loading zone and activated. No XBot is located at the loading zone exit position (another XBot can be loaded onto the Flyway without collision) |
|
Postconditions |
The Auto Loading Zone is ready to receive the next XBot |
Description
This command is used to notify the PMC that the loading zone is clear and ready for the next XBot to be loaded.
Changelog
PMC v117.15.15 - Added Next XBot ID, which allows the user to assign an ID to the next incoming XBot
PMC v117.17.43 - Added Next XBot Orientation, which allows the user to specify which orientation the next loaded XBot will be in