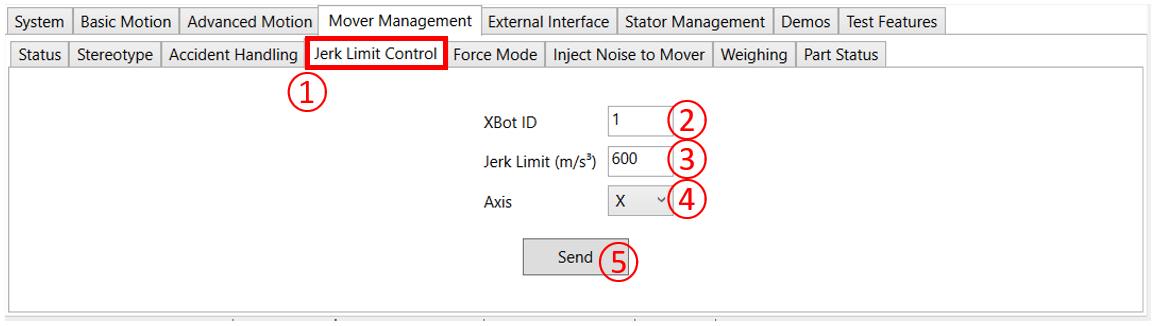
① Click the Mover Management \ Jerk Limit Control tab
② Enter the ID of the XBot you want to set the jerk limit for
③ Enter the jerk limit
④ Choose the axis to set the jerk limit for. (X and Y share the same jerk limit).
⑤ Click "Send" when ready

① Click the Mover Management \ Jerk Limit Control tab
② Enter the ID of the XBot you want to set the jerk limit for
③ Enter the jerk limit
④ Choose the axis to set the jerk limit for. (X and Y share the same jerk limit).
⑤ Click "Send" when ready