
Activate and levitate all XBots, then provide the ID of discovered XBots in the output.
Fieldbus Interface
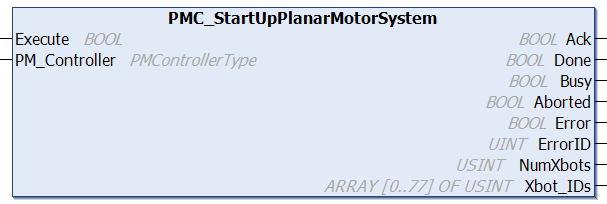
PMC_StartUpPlanarMotorSystem
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
PMC state is INACTIVE or ERROR, XBots not controlled by the system. |
|
Postconditions |
PMC state goes into ACTIVATING, then OPERATIONAL. XBots are levitated. |
Description
Activate and levitate all XBots, then provide the ID of discovered XBots in the output.
This command can be used to combine several commonly used commands at system start up. It will:
-
Activate and Levitate all XBots
-
Read the XBot IDs of the discovered XBots
-
Provide the XBot IDs in the output array of the function block
The command will perform the necessary error checks at each step and only complete successfully if all steps have succeeded.