Use this command to save a Motion Macro so that it can run using the Run Motion Macro command. After a Motion Macro is saved, new commands cannot be added to it.
Fieldbus Interface
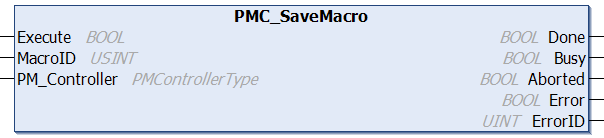
PMC_SaveMacro
Inputs
Name
Data Type
Description
Execute
BOOL
Execution of the function block begins on a rising edge of this input.
MacroID
USINT
Macro ID, valid range [128,191]
PM_Controller
PMControllerType
Data structure that specifies which PMC to connect to. There should be only 1 instance of this variable for each connected PMC.
Outputs
Name
Data Type
Description
Done
BOOL
Execution successful. Function block is finished. (Note: Done will not become TRUE if Execute is already FALSE)
Busy
BOOL
Function block is active and must continue to be called.
Aborted
BOOL
Command aborted by another command.
Error
BOOL
If there is an error in processing the command, then Error = TRUE, otherwise, FALSE.
MotionMacroReturnID: ID of the macro this return is providing information for
int macroState: 0 = macro is not saved; 2 = macro is saved and ready to run
int storedCommandsCount: number of commands stored in this macro
Conditions
Operating Conditions
Preconditions
Commands have been added to the specified Macro, the Macro has not been saved.
Postconditions
The specified Macro will be saved and ready to run.
Description
Use this command to save a Motion Macro so that it can run using the Run Motion Macro command. After a Motion Macro is saved, new commands cannot be added to it.