
During safety events, it may be desirable to actively stop the motion of the XBots and deactivate them, instead of simply turning off the power and rely on friction and gravity to stop the XBots.
This command can be used to immediately (in the next communication cycle) send a command the PMC to stop all XBots and deactivate them. Bypassing the motion buffer and any other commands that may be executing, but using the digital input signals (on the Fieldbus) to the PMC.
Please note that this is NOT a replacement for safety devices!
This can be used on the entire system, or individual Power Sectors. (See Power Sector Configuration and Power Sector Commands)
After configuration, the Quick Stop will be triggered by Send Digital Input to PMC.
Fieldbus Interface
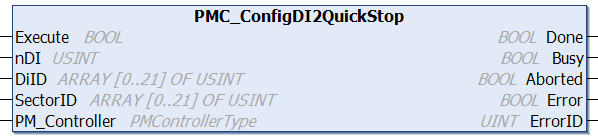
PMC_ConfigDI2QuickStop
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
None |
|
Postconditions |
Specified Digital Inputs is set to Quick Stop the specified Power Sectors |
Description
During safety events, it may be desirable to actively stop the motion of the XBots and deactivate them, instead of simply turning off the power and rely on friction and gravity to stop the XBots.
This command can be used to immediately (in the next communication cycle) send a command the PMC to stop all XBots and deactivate them. Bypassing the motion buffer and any other commands that may be executing, but using the digital input signals (on the fieldbus) to the PMC.
Please note that this is NOT a replacement for safety devices!
This can be used on the entire system, or individual Power Sectors. (See Power Sector Configuration and Power Sector Commands)
After configuration, the Quick Stop will be triggered by Send Digital Input to PMC.
Example scenario:
-
After start up, Quick Stop is configured with this command
-
User opens door @ time = 0ms
-
Hardware sends digital signal to PLC. PLC informs the PMC in the next communciation cycle via Send Digital Input to PMC
-
PMC starts deceleration and deactivation process.
-
At a fixed time from when user opens the door, e.g. 300ms, triggered by a safety relay with delayed output, power to the Flyways is turned off