
Virtual XBot Multiplex Position Feedback Control - Use this command to choose where the specified virtual XBot should be part of the cyclic multiplex position feedback. These are the feedback read using Read XBot Position.
Fieldbus Interface
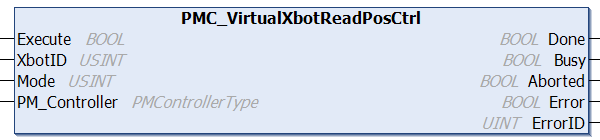
PMC_VirtualXbotReadPosCtrl
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
None |
|
Postconditions |
The specified virtual XBot is added to or removed from the multiplexed cyclic position feedback |
Description
Virtual XBot Multiplex Position Feedback Control - Use this command to choose where the specified virtual XBot should be part of the cyclic multiplex position feedback. These are the feedback read using Read XBot Position.