
This command can be used to resume the motion of an XBot previously stopped using the Pause XBots command.
Fieldbus Interface
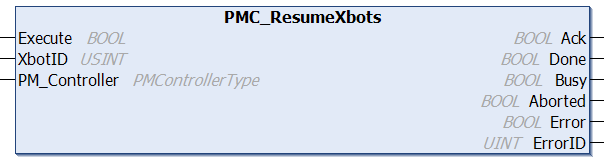
PMC_ResumeXbots
Ethernet Interface
PMCRTN MotionInterruptCommand(int xbotID, MOTIONINTERRUPTOPTIONS motionInterruptOption)
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
XBot State is Idle due to having been stopped by a Pause XBots command. |
|
Postconditions |
XBot will resume its motion by executing the commands in its motion buffer, including the one that was paused. |
Description
This command can be used to resume the motion of an XBot previously stopped using the Pause XBots command.
-
On resuming Trajectory motion, it will interpolate position points until the trajectory can be followed precisely again