
A motion macro can be created to greatly simplify command sending to XBots. Consider the following trajectory, where two XBots are repeatedly completing the same operations.
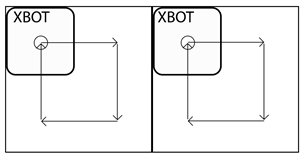
Instead of sending the linear motion commands to each XBot directly, the linear motion commands can be sent to a Motion Macro. The only difference is instead of specifying an XBot ID in the linear motion command, a Macro ID is specified instead.
The Macro stores all valid commands sent to it. For example, in this case, it could be 4 linear motion commands in relative mode. After the Macro is saved, all of its saved commands can be run by any XBot, using a single Run Macro command. This greatly reduces coding complexity, in this case, it reduced 8 commands (for 2 XBots) into 2 commands.
It is possible to add a Run Macro command to the Motion Macro, meaning multiple Macros can be chained together. Adding a recursive Run Macro command will cause the Macro to loop forever.
Motion macros can accept either absolute or relative position commands.
Motion macros do not return travel time calculations nor do they perform Flyway boundary checks at the time the command is loaded onto the macro.
A Motion Macro must be saved before it can run. This can be done through the Save Macro command, or by adding a recursive Run Macro command to the Macro.
The number of commands that can be stored in a single Macro is 200.
A total of 64 Macros are available, Macro IDs start from 128 and end at 191.
If more Macros are required, please contact PMI for support.