
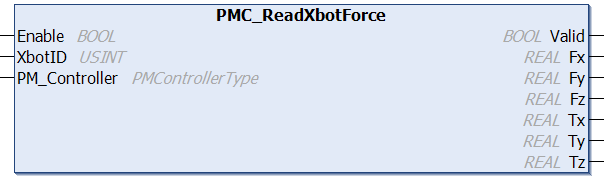
Read force data of a particular XBot.
Fieldbus Interface
PMC_ReadXbotForce
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
None |
|
Postconditions |
XBot's force data is provided in the output. |
Description
This commands operates using a buffer to store all XBot forces, and a multiplexed response from the PMC to get new data. This means each cycle stores the force information of 1 XBot into the buffer. The command fetches the information from the storage buffer for the specified XBot. This means:
-
The age of the data (worst case) when calling this command is (cycle time * # of XBots)
-
The time it takes for the command (worst case) to provide a response is (immediate)
-
A short cycle time is recommended for applications with a high number of XBots, in order to provide up-to-date data