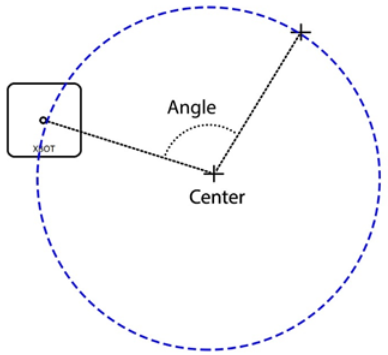
The arc motion command can be used to move an XBot in an arc path, the arc is defined by the arc center location, the rotation angle, and the rotation direction (clockwise or counterclockwise).
Fieldbus Interface
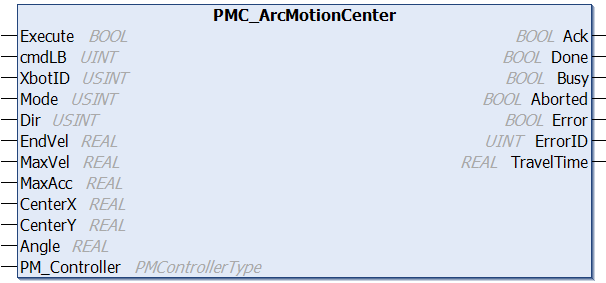
PMC_ArcMotionCenter
Inputs
Name
Data Type
Description
Execute
BOOL
Execution of the function block begins on a rising edge of this input.
Time required to complete this command, in seconds
Conditions
Operating Conditions
Preconditions
XBot is in the Idle state, Obstacle Detected state, Motion state, Stopped state, Hold Position state, or Waiting state.
Postconditions
If the XBot is ready to immediately begin executing the command, then the XBot will enter the Motion state. Otherwise, the XBot state remains unchanged, but the command will be added to the XBot's motion buffer.
Description
The arc motion command can be used to move an XBot in an arc path, the arc is defined by the arc center location, the rotation angle, and the rotation direction (clockwise or counterclockwise).
The target or center position can be specified either in absolute coordinates or relative coordinates. Relative coordinates are relative to the reference position of the XBot when the command begins execution.
Only the X- and Y-positions (also called the long axis) are controlled by this command. The Z-, Rx-, Ry-, and Rz-positions are maintained during this motion command.
The maximum speed and ending speed must be specified. Similar to linear motion, the input maximum speed will be automatically constrained if it is below or above the system limits and the ending speed will be limited if the travel distance is too short
The ending speed and maximum speed are also limited by both the tangential and the normal acceleration for the arc. The speeds may be automatically adjusted to a lower value if required so that the accelerations do not exceed their limits.