
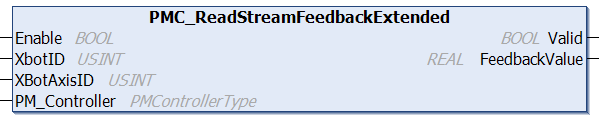
When using Real-Time Ethernet to connect to the system, after the feedback stream channel has been set up using the Configure Feedback Stream Extended command, this command is used to read the actual feedback values.
Fieldbus Interface
PMC_ReadStreamFeedbackExtended
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
Feedback Stream channel has been set up using the Configure Feedback Stream Extended command |
|
Postconditions |
The FeedbackValue output is set to the data from the feedback stream |
Description
When using Real-Time Ethernet to connect to the system, after the feedback stream channel has been set up using the Configure Feedback Stream Extended command, this command is used to read the actual feedback values.