
This command can be used to pause the motion of the specified XBot. The XBot's motion buffer is maintained, its current executing command is inserted into the motion buffer as the first command to execute on resume.
Fieldbus Interface
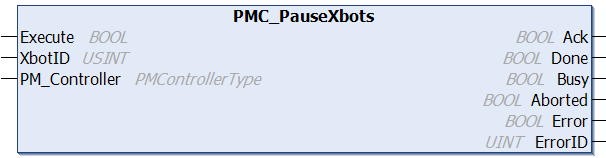
PMC_PauseXbots
Ethernet Interface
PMCRTN MotionInterruptCommand(int xbotID, MOTIONINTERRUPTOPTIONS motionInterruptOption)
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
XBot State is Motion or Waiting. XBot is NOT executing the following commands: Stream Mode Control, Force Mode, Stop XBot Motion, Levitation/Landing or Planet XBots Control |
|
Postconditions |
XBot will pause its current motion by stopping, it will resume motion upon receiving a Resume XBot command |
Description
This command can be used to pause the motion of the specified XBot and return to the Idle state. The XBot's motion buffer is maintained, its current executing command is inserted into the motion buffer as the first command to execute on resume.
-
Pausing Stream Mode Control, Force Mode, Stop XBot Motion, Levitation/Landing or Planet XBots Controlis not supported
-
The current executing command and other commands in the motion buffer will not raise the Done or Aborted signal when the XBot is paused