
Use this function block to make the PMC enter/exit service mode.
Fieldbus Interface
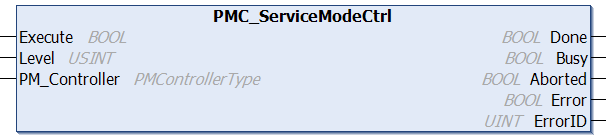
PMC_ServiceModeCtrl
Ethernet Interface
PMCRTN EnterServiceMode()
PMCRTN ExitServiceMode()
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
None |
|
Postconditions |
PMC enters/exits service mode |
Description
Use this function block to make the PMC enter/exit service mode. During service mode, motion commands are blocked, but you can:
-
Perform updates
-
Perform system hardware diagnosis
Service mode will be exited if the same command is used to exit service mode, or if the PMC is rebooted.
This should not be used as a safety feature!