Cam Mode Control Bufferable allows the cam motion to be buffered. This means that the XBot does not have to be in Idle state before sending the command.
0: Enter cam at the beginning of table and exit cam at the end of table (BIEO)
1: Enter cam at the end of table and exit cam at the beginning of table (EIBO)
2: Enter cam at the beginning of table and exit cam at the beginning of table (BIBO)
3: Enter cam at the end of table and exit cam at the end of table (EIEO)
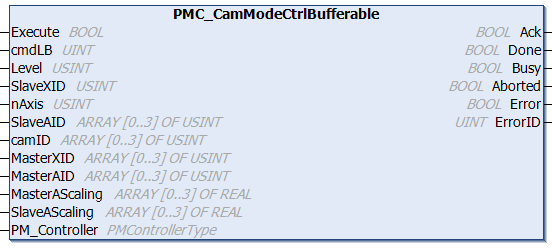
SlaveXID
USINT
ID of the XBot. Real XBot IDs [1,78]. Virtual XBot IDs [100,127]
nAxis
USINT
# of slave axis specified in this command (all for the same slave XBot)
SlaveAID
USINT[0..3]
Array of size 4, enter up to 4 axis of the slave XBot to control. Axid IDs: 0 = no axis, 1 = X, 2 = Y, 3 = Z, 4 = RX, 5 = RY, 6 = RZ
camID
USINT[0..3]
Array of size 4, ID of the cam used to drive the slave axis
MasterXID
USINT[0..3]
Array of size 4, ID of the Master XBots
MasterAID
USINT[0..3]
Array of size 4, axis ID of the master XBot axis that is used to drive the slave xbot axis. Axid IDs: 0 = no axis, 1 = X, 2 = Y, 3 = Z, 4 = RX, 5 = RY, 6 = RZ
MasterAScaling
REAL[0..3]
Array of size 4, scalling factor of each master axis, positive value only
SlaveAScaling
REAL[0..3]
Array of size 4, scalling factor of each slave axis, positive value only
PM_Controller
PMControllerType
Data structure that specifies which PMC to connect to. There should be only 1 instance of this variable for each connected PMC.
Outputs
Name
Data Type
Description
Ack
BOOL
Command has been accepted by the PMC when Ack = TRUE.
Done
BOOL
Execution successful. Function block is finished. (Note: Done will not become TRUE if Execute is already FALSE)
Busy
BOOL
Function block is active and must continue to be called.
Aborted
BOOL
Command aborted by another command.
Error
BOOL
If there is an error in processing the command, then Error = TRUE, otherwise, FALSE.
XBot is in the Idle state, Obstacle Detected state, Motion state, Stopped state, Hold Position state, or Waiting state.
Postconditions
If the XBot is ready to immediately begin executing the command, then the XBot will enter the Motion state. Otherwise, the XBot state remains unchanged, but the command will be added to the XBot's motion buffer.
Description
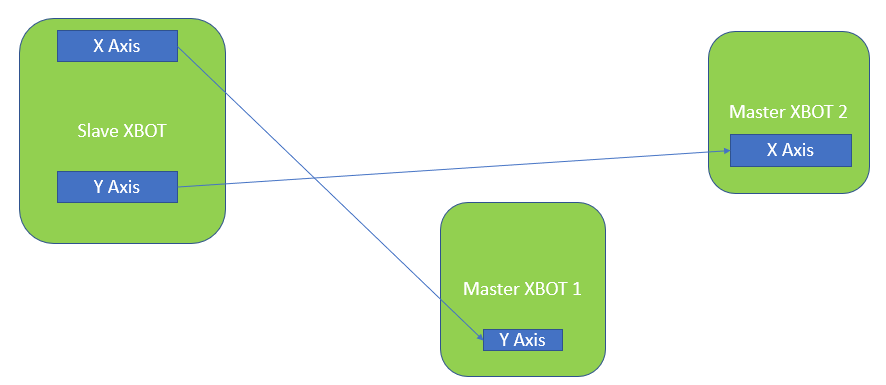
Cam operation can make 1 or more axis of the slave XBot follow the motion of 1 more axis of 1 or more master XBots.
It is not necessary to follow the same axis (you can use the Y axis motion of the master XBot to drive the X axis motion of the slave XBot)
The way the slave XBot axis follows the master XBot axis is user defined in a text file, please see Cam Configuration instructions
Cam Mode Control Bufferable allows the cam motion to be buffered. This means that the XBot does not have to be in Idle state before sending the command. The cam will execute once, going through the values configured according to the Level chosen.
Behaviour During Obstacles
If the slave XBot encounters an obstacle (i.e. another XBot is in the way) while following a cam, it will stop following the master and go to the Stopped State. Its motion will not be resumed even if the obstacle XBot is moved away. If other motions are buffered after the Cam, the XBot will proceed to execute those.