
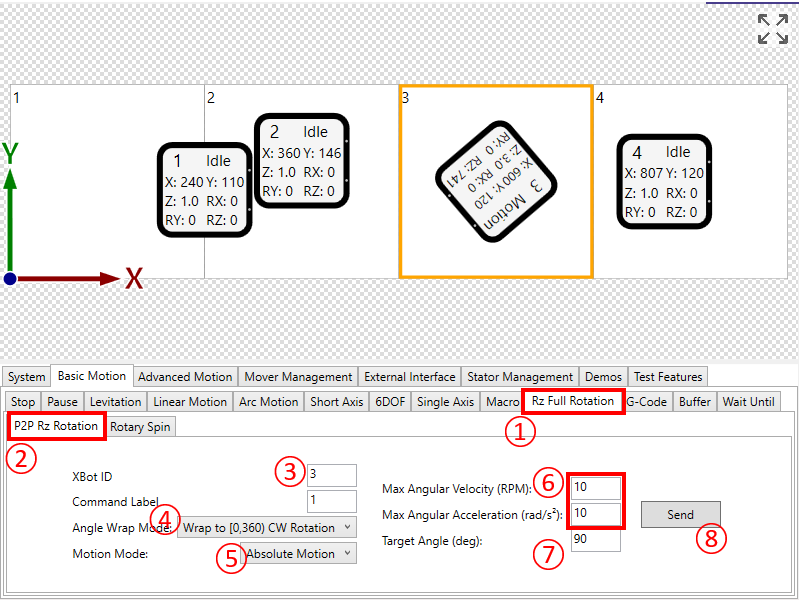
① Click the Basic Motion \ RZ Full Rotation tab
② Click the P2P Rz Rotation sub tab
③ Enter the XBot ID
④ Choose the wrap mode:
-
No Wrap: Absolute Position, cumulative rotations counted, up to 100 rotations.
-
Wrap to [0,360) CCW Rotation: Positive Rz rotation (counter clockwise) in the range of 0 up to, but not including, 360.
-
Wrap to [0,360) CW Rotation: Negative Rz rotation (clockwise) in the range of 0 up to, but not including, 360.
⑤ Choose whether the motion will be absolute or relative to the current XBot position
⑥ Enter speed parameters
⑦ Enter target angle
⑧ Click "Send" when ready
Note:
-
XBot needs to be in the center of a Flyway in order to be rotated.