
This command is used to read the status of a specific zone.
Fieldbus Interface
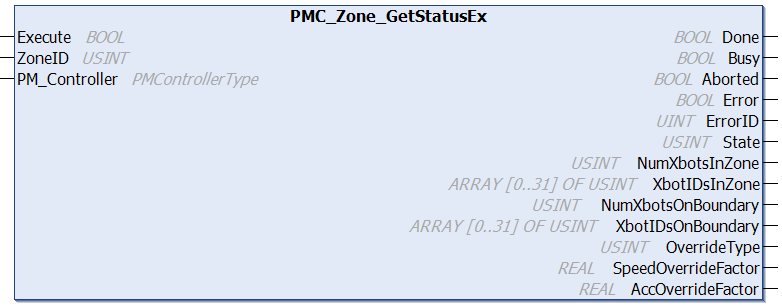
PMC_Zone_GetStatusEx
Inputs
|
Name |
Data Type |
Description |
|---|---|---|
|
Execute |
BOOL |
Execution of the function block begins on a rising edge of this input. |
|
ZoneID |
USINT |
Zone ID, same as Flyway ID by default, you may define your own Zones as well using Define Zone |
|
PM_Controller |
PMControllerType |
Data structure that specifies which PMC to connect to. There should be only 1 instance of this variable for each connected PMC. |
Outputs
|
Name |
Data Type |
Description |
|---|---|---|
|
Done |
BOOL |
Execution successful. Function block is finished. (Note: Done will not become TRUE if Execute is already FALSE) |
|
Busy |
BOOL |
Function block is active and must continue to be called. |
|
Aborted |
BOOL |
Command aborted by another command. |
|
Error |
BOOL |
If there is an error in processing the command, then Error = TRUE, otherwise, FALSE. |
|
ErrorID |
UINT |
0x0: All OK. Otherwise, please see Fieldbus Reply Codes. |
|
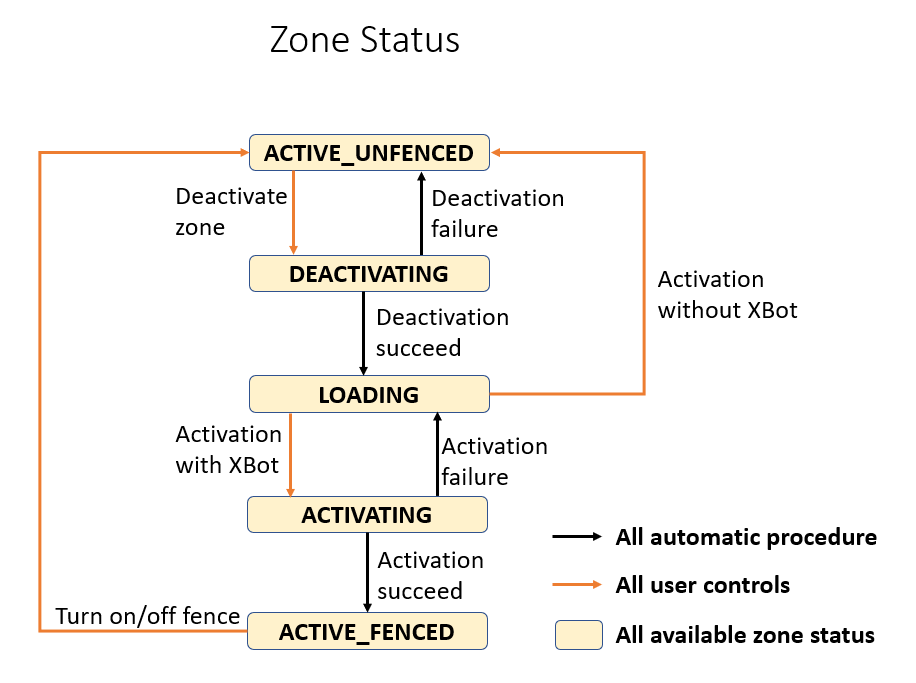
State |
USINT |
Zone state: 0 = N/A, 1 = ACTIVE_UNFENCED, 2 = DEACTIVATING, 3 = LOADING, 4 = ACTIVATING, 5 = ACTIVE_FENCED, 6 = ERROR |
|
NumXbotsInZone |
USINT |
Number of XBots completely inside the zone |
|
XbotIDsInZone |
USINT[0..31] |
IDs of XBots completely inside the zone |
|
NumXbotsOnBoundary |
USINT |
Number of XBots on the zone boundary |
|
XbotIDsOnBoundary |
USINT[0..31] |
IDs of XBots on the zone boundary |
|
OverrideType |
USINT |
0 = override with ratio, 1 = override with absolute speed and acceleration limits |
|
SpeedOverrideFactor |
REAL |
Multiplicative factor or absolute limit for XBot speed in the zone (0-2 or m/s) |
|
AccOverrideFactor |
REAL |
Multiplicative factor or absolute limit for XBot acceleration in the zone (0.001-2 or m/s^2) |
Ethernet Interface
ZoneStatusReturn GetZoneStatus(int zoneID)
Parameters
|
Name |
Type |
Description |
|---|---|---|
|
zoneID |
int |
Zone ID, same as Flyway ID by default, you may define your own Zones as well using Define Zone |
Returns
|
Name |
Type |
Description |
|---|---|---|
|
ZoneStatusReturn.PmcRtn |
PMCRTN enum |
ALLOK (0): Command Accepted. Otherwise, please see Ethernet Reply Codes. |
|
ZoneStatusReturn.ZoneState |
enum |
Zone state |
|
ZoneStatusReturn.XBotCount |
int |
Number of XBots inside the zone |
|
ZoneStatusReturn.XBotIDs |
int[] |
List of XBot IDs of XBots inside the zone |
|
ZoneStatusReturn.XBotCountOnBorder |
int |
Number of XBots on the zone's border |
|
ZoneStatusReturn.XBotIDsOnBorder |
int[] |
List of XBot IDs of XBots on the zone's border |
|
ZoneStatusReturn.SpeedOverrideRatio |
float |
Speed override ratio of the zone. See Zone Override |
|
ZoneStatusReturn.AccelerationOverrideRatio |
float |
Acceleration override ratio of the zone. See Zone Override |
|
ZoneStatusReturn.IntersectionXbotLimit |
int |
Max number of XBots allowed in zone. See Intersection Zone |
|
ZoneStatusReturn.MaxZHeightLimit |
float |
Max Z height limit in meters |
|
ZoneStatusReturn.minXM |
double |
The X coordinate lower bounds of the zone in meters |
|
ZoneStatusReturn.minYM |
double |
The Y coordinate lower bounds of the zone in meters |
|
ZoneStatusReturn.maxXM |
double |
The X coordinate upper bounds of the zone in meters |
|
ZoneStatusReturn.maxYM |
double |
The Y coordinate upper bounds of the zone in meters |
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
None |
|
Postconditions |
Zone status returned |
Description
This command is used to read the status of a specific zone.
Changelog
PMC v117.22.55 (Fieldbus v6.03.048.00) - Added overrideType, speedOverrideFactor and accOverrideFactor to the outputs