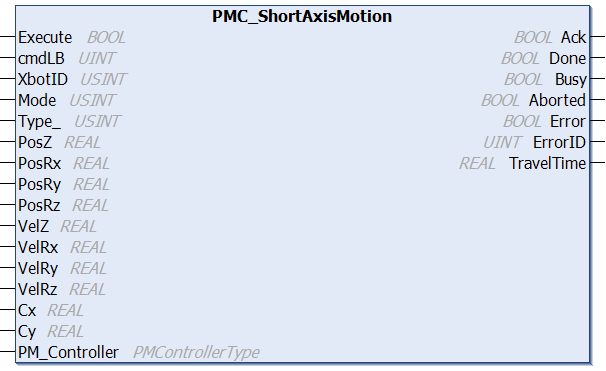
Time required to complete this command, in seconds
Conditions
Operating Conditions
Preconditions
XBot is in the Idle state, Obstacle Detected state, Motion state, Stopped state, Hold Position state, or Waiting state.
Postconditions
If the XBot is ready to immediately begin executing the command, then the XBot will enter the Motion state. Otherwise, the XBot state remains unchanged, but the command will be added to the XBot's motion buffer.
Description
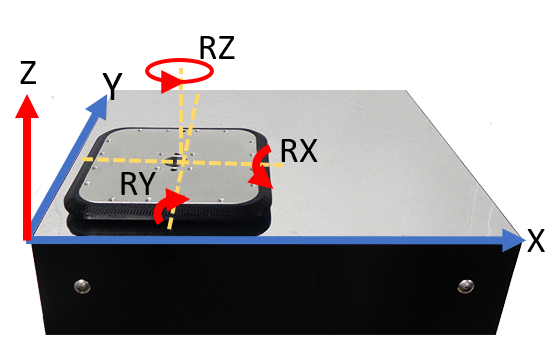
This command can be used to control the Z-, Rx-, Ry-, and Rz-positions (also called the short axis) of the XBot.
The maximum speed for each axis must be specified. The ending speed is zero. The input maximum speed will be automatically constrained if they are below or above the system limits. (The upper system short axes speed limit can be defined in the Configurator.)
The lower limit is Vz = 0.0002 m/s, Vrx = Vry = Vrz = 0.02 rad/s
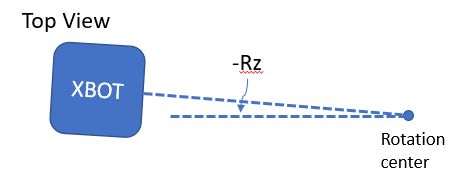
It’s possible to rotate the XBot around some point that is not its own center. Use the “User Specified Center” mode.
In this case, the rotation center is specified in absolute coordinates with respect to the system origin. The XBot will move in X,Y, and RZ to always maintain the same distance from the rotation center, and achieve the desired RZ value.
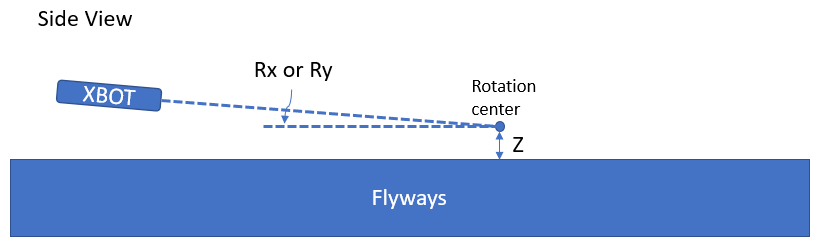
It is also possible to specify the tilt relative to the user defined rotation center.
In the user defined section mode, Z is used to specify the rotation center height, and Rx and RY is used to specify the tilt relative to the rotation center.
The Rx and Ry (tilt) limits depend on the levitation height of the XBot. When the XBot is at a greater height, the XBot can achieve a greater tilt angle without touching the flyway. Conversely, if the XBot height is low, commands with tilt angles that would cause the XBot to touch the flyway will be rejected.