
Cam operation can make 1 or more axis of the slave XBot follow the motion of 1 more axis of 1 or more master XBots.
The trajectory is defined by a text file (xxx.txt), with 1 columns. Column definitions are fixed, you must upload 1 column, without any header rows.
The single Cam column is defined in mm.
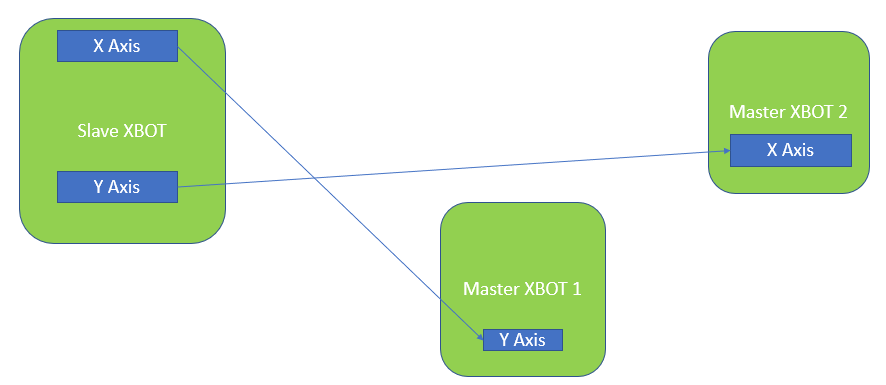
It is not necessary to follow the same axis (you can use the Y axis motion of the master XBot to drive the X axis motion of the slave XBot)
The XBot will directly follow the trajectory provided by the file, therefore it is important to keep the speed and acceleration within the specified limits when generating the trajectory.
The position interval of cam can be from 1 [mm] to 1000 [mm].
# of cams is limited to 64, this can be upgraded to a higher number. Please contact PMI if you require more cams.