Library Instructions
Getting Started
-
Download the provided catalog.
-
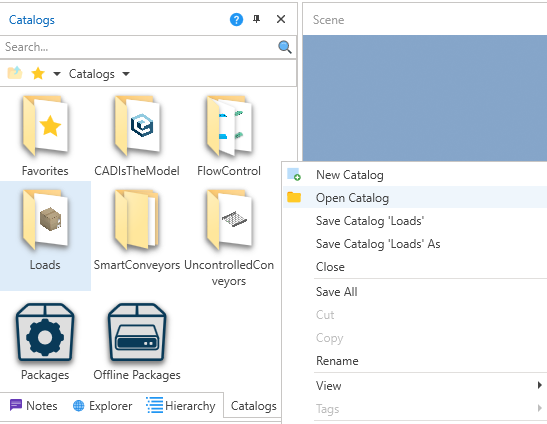
In Emulate3D, navigate to the Catalogs tab and open the PlanarMotorInc catalog
-
A new page in the ribbon should appear when the catalog is done loading

-
The catalog contains XBots and Flyways for both 3-Series and 4-Series, as well as the PMC

Using the Ribbon
Configuration group
A PMC configuration file can be imported into Emulate3D using the Load From PC button. The configuration file is typically obtained through the Planar Motor Tool. Loading a new configuration is only allowed when the PMC is not connected and the model is not running.
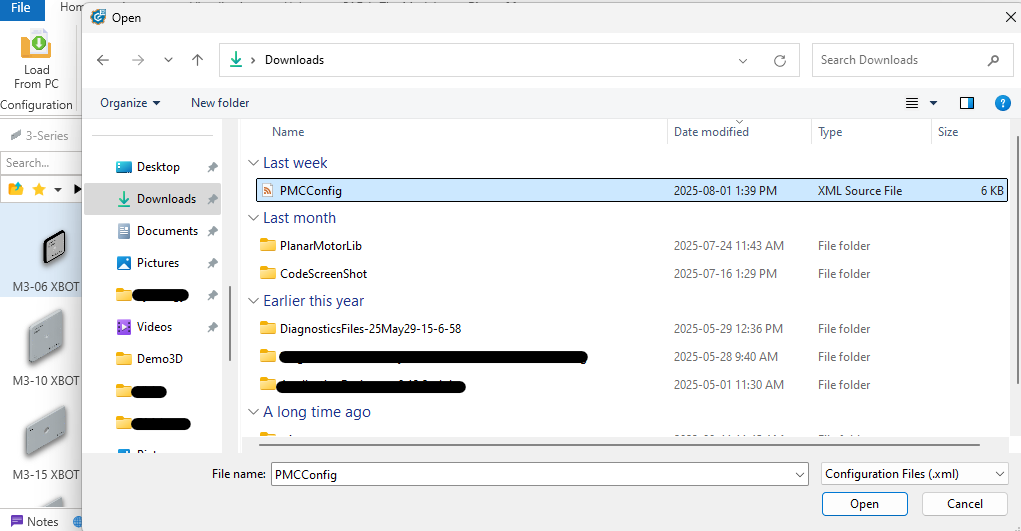
The Flyways and XBots will automatically be loaded into the Scene from the Catalog at the PMC Origin, based on the configuration file. The User Origin will also be adjusted accordingly.
Please make sure that the configuration file is valid, as additional checks are not performed.
Connection group
Connection to the PMC is controlled via the Connect to PMC and Disconnect from PMC buttons. It will attempt to connect to the PMC at the address specified in the IP Address field.
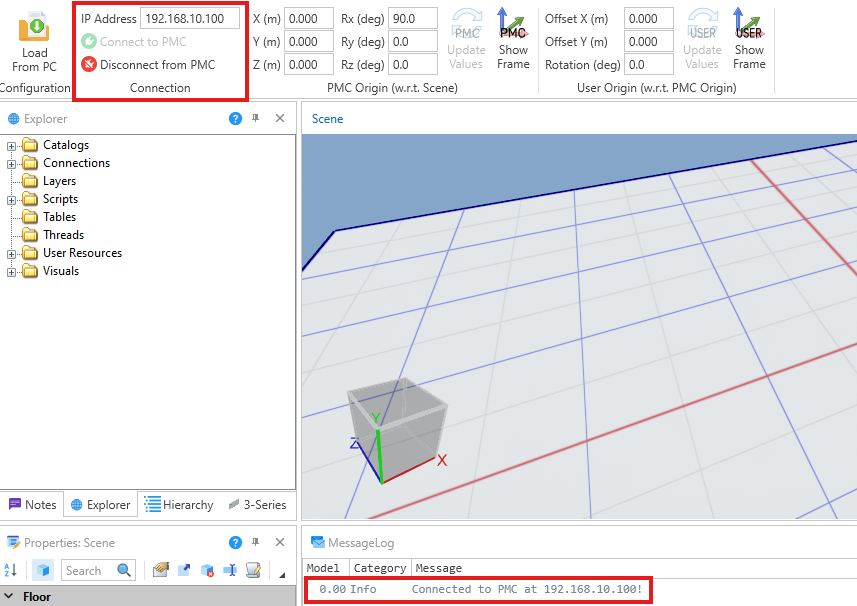
Status messages will appear in the message log. A successful connection will also be indicated by the Connect to PMC button being disabled, and the Disconnect from PMC button being enabled.
Running the model while the PMC is connected would allow digital twinning between the Emulate3D model and the actual XBots.
PMC Origin group
The PMC Origin represents the bottom left corner of the Planar Motor System. The Flyways and User Origin refer to this frame for their respective positions.
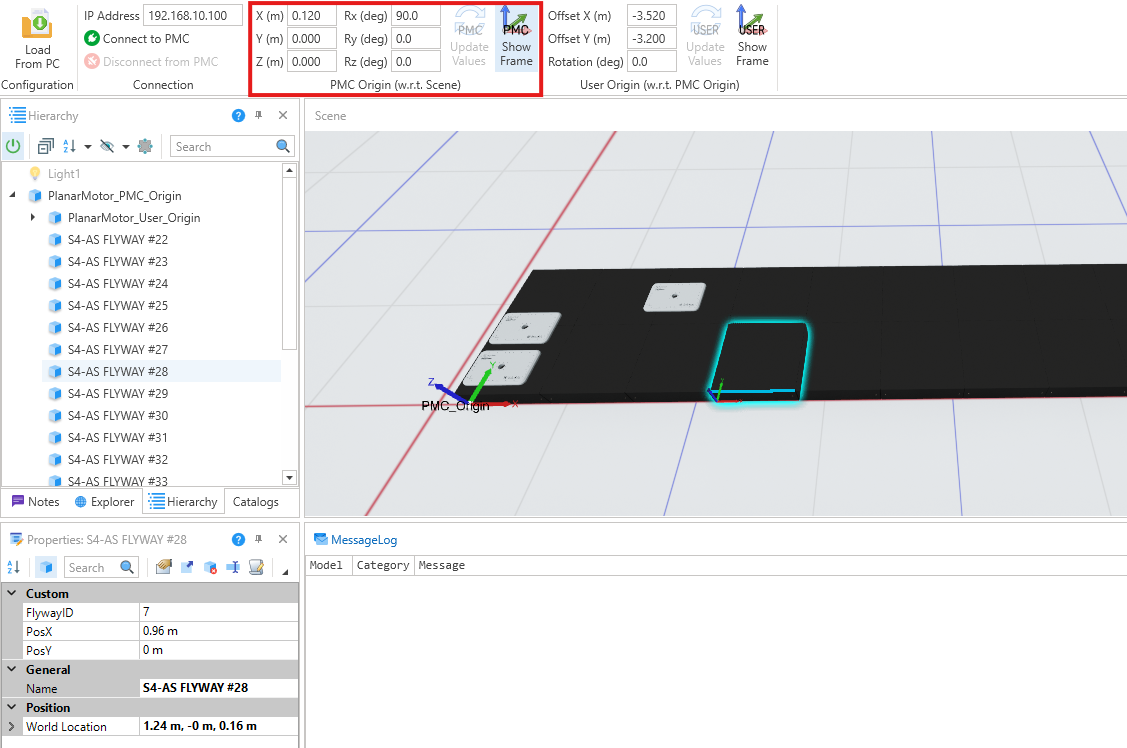
The values in the fields X (m), Y (m), Z (m), Rx (deg), Ry (deg) and Rz (deg) represent the position of the PMC Origin relative to the Scene, using Emulate3D’s coordinate system, and are applied to the frame using the Update Values button. The visibility of the PMC Origin frame can be toggled using the Show Frame check.
Moving the Planar Motor System around in the Scene is done through this group.
User Origin group
The User Origin represents the origin position for the XBots. It may or may not be different from the PMC Origin.
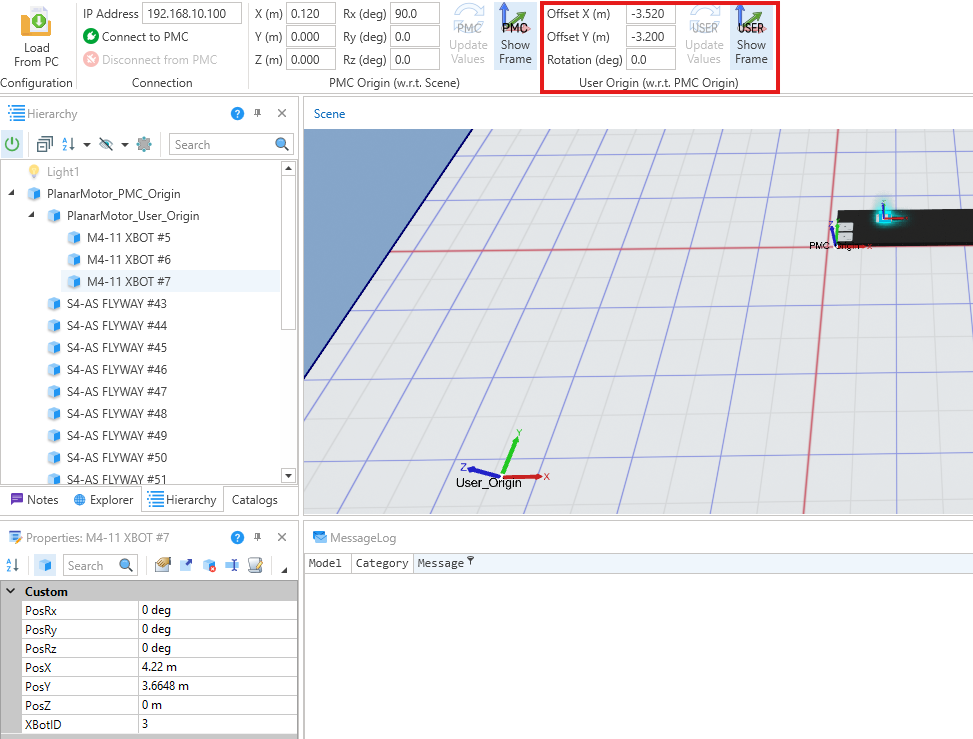
The values in the fields Offset X (m), Offset Y (m) and Rotation (deg) represent the position of the User Origin relative to the PMC Origin, using the PMC Origin frame’s coordinate system, and are applied to the frame using the Update Values button. The visibility of the User Origin frame can be toggled using the Show Frame check.
Moving the User Origin will only affect the XBots.
Please note that both the PMC and User Origins use a right-handed coordinate system, which is different from Emulate3D’s coordinate system.
Using the Catalog
The catalog is divided into Series. Flyways and XBots are only compatible within their own Series.
Flyways
The position of the Flyways are given in the PosX and PosY properties. These values are determined by the position of the Flyway’s bottom left corner relative to the PMC Origin frame, in the PMC Origin frame’s coordinate system.
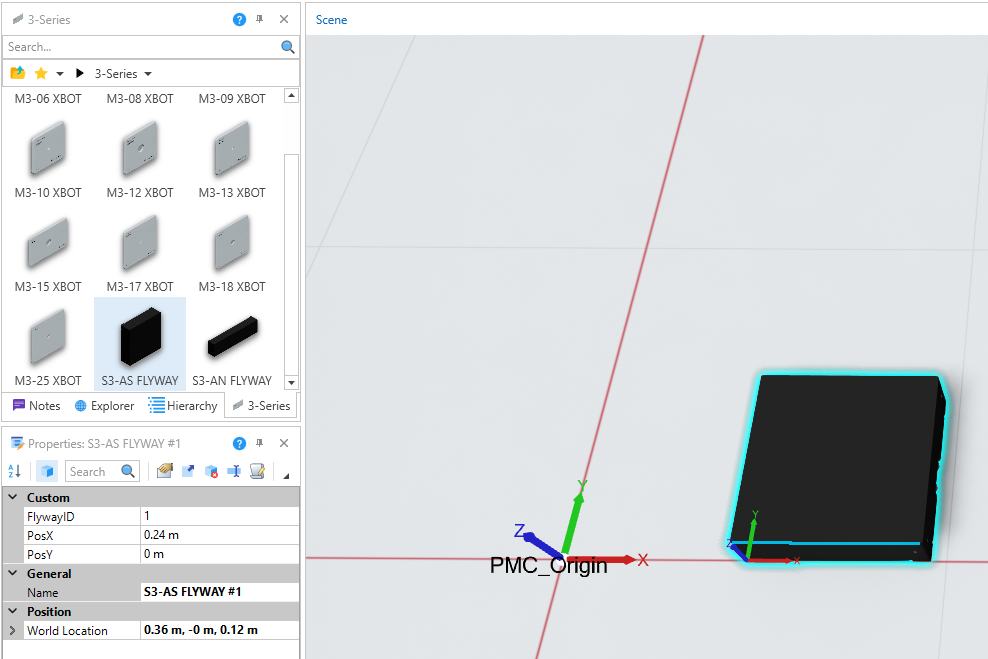
Flyways can also be dragged in the Scene, and they will snap to each other. This makes it easier to create custom layouts.
XBots
PosX, PosY, PosZ, PosRx, PosRy and PosRz indicate the position of the XBot’s center relative to the User Origin frame, in the User Origin frame’s coordinate system. Note that although the frame appears at Z = 0, the XBot’s Z = 0 position is at the top surface of the Flyway.
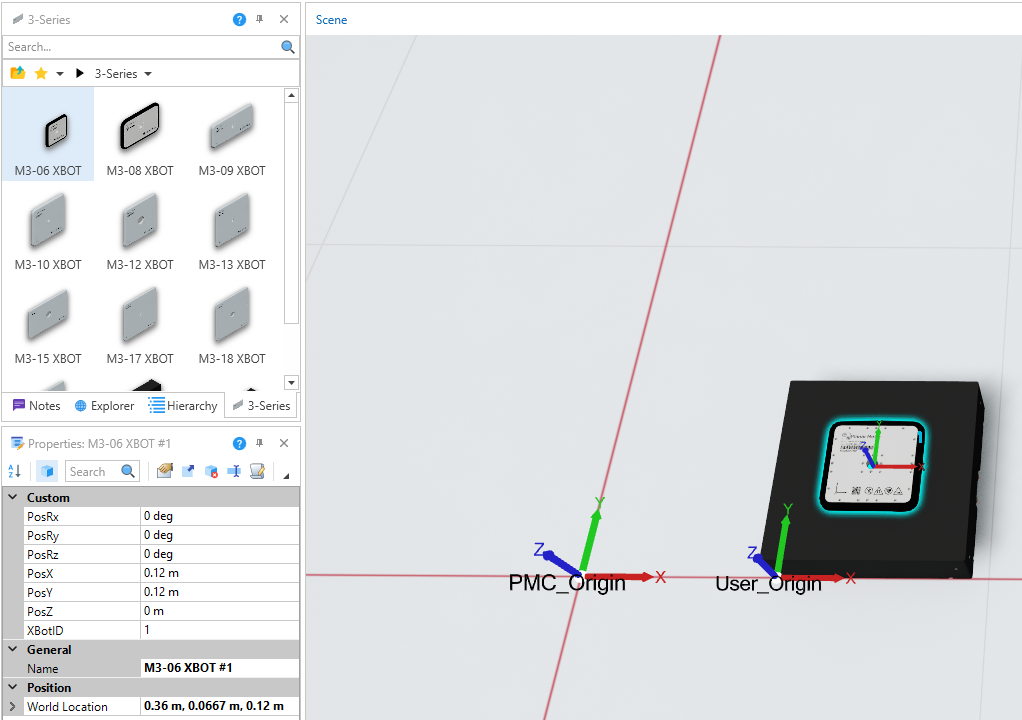
The XBotID of the XBot is a unique ID generated when an XBot is inserted into the Scene. An XBot in the Scene will follow the corresponding XBot on the Planar Motor System when connected to the PMC.
PMC
The PMC model is included for completeness but does not serve any additional purpose.