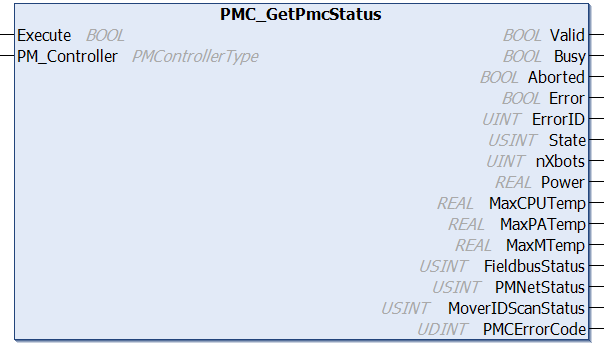
This command is used to get the status of the Planar Motor Controller (PMC).
Fieldbus Interface
PMC_GetPmcStatus
Inputs
|
Name
|
Data Type
|
Description
|
|
Execute
|
BOOL
|
Execution of the function block begins on a rising edge of this input. |
|
PM_Controller
|
PMControllerType
|
Data structure that specifies which PMC to connect to. There should be only 1 instance of this variable for each connected PMC. |
Outputs
|
Name
|
Data Type
|
Description
|
|
Valid
|
BOOL
|
TRUE: output values have been successfully read. FALSE: unable to obtain output values. |
|
Busy
|
BOOL
|
Function block is active and must continue to be called. |
|
Aborted
|
BOOL
|
Command aborted by another command. |
|
Error
|
BOOL
|
If there is an error in processing the command, then Error = TRUE, otherwise, FALSE. |
|
ErrorID
|
UINT
|
0x0: All OK. Otherwise, please see Fieldbus Reply Codes. |
|
State
|
USINT
|
PMC State Description. 0: Booting; 1: Inactive; 2: Activating; 5: Operation; 7: Deactivating; 8: Error Handling; 9: Error |
|
nXbots
|
UINT
|
Number of XBots
|
|
Power
|
REAL
|
System power consumption in Watts
|
|
MaxCPUTemp
|
REAL
|
Highest CPU temperature in the system in degrees Celsius (integer precision)
|
|
MaxPATemp
|
REAL
|
Highest amplifier temperature in the system in degrees Celsius (integer precision)
|
|
MaxMTemp
|
REAL
|
Highest motor temperature in the system in degrees Celsius (integer precision)
|
|
FieldbusStatus
|
USINT
|
0: Connected and synced; 1: Disconnected; 2: Connected but not synced
|
|
PMNetStatus
|
USINT
|
0: Connected; 1: Disconnected
|
|
MoverIDScanStatus
|
USINT
|
0: At least one XBot did not finish Absolute ID scan; 1: All XBots finished Absolute ID scan
|
|
PMCErrorCode
|
UDINT
|
Current PMC Error Code
|
Conditions
|
Operating Conditions
|
|
Preconditions
|
None
|
|
Postconditions
|
Information received about the PMC status
|
Description
This command is used to get the status of the Planar Motor Controller (PMC).