
Commanding many XBots to move to their respective target positions according to an auto generated paths, avoiding collisions with each other collaboratively. It uses the default speed and acceleration from the configuration to complete the motions.
For RoutingType, labeled routing means the specified XBots must go the corresponding positions specified in the position arrays, i.e., XbotID[0] must go to PosX[0] and PosY[0]. This should be used if the order of XBots is important, such as XBots 1 through 8 must line up in a line in ascending order.
For unlabeled routing, any of the XBots specified in the XBot ID array can go to any of the positions specified in the position arrays, i.e., XbotID[1] may go to PosX[0] and PosY[0], using the most convenient way possible. This should be used if the order of the XBots is NOT important, such as when 8 XBots should be in a line, but it does not matter which XBot is first, etc.
Fieldbus Interface
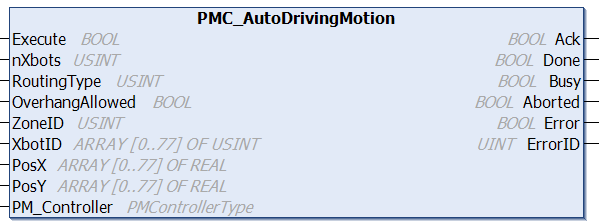
PMC_AutoDrivingMotion
Ethernet Interface
PMCRTN AutoDrivingMotionSI(int xbotCount, ASYNCOPTIONS mode, int[] xbotIDs, double[] targetsXMeters, double[] targetsYMeters, double isOverhangAllowed = false)
Conditions
|
Operating Conditions |
|
|---|---|
|
Preconditions |
XBot(s) State is Idle or Stopped. |
|
Postconditions |
The specified XBot(s) will enter the Motion State. |
Description
Commanding many XBots to move to their respective target positions according to an auto generated paths, avoiding collisions with each other collaboratively.
-
User does not need to specify how each XBot gets to its destination, greatly reducing the Controller computation burden
-
The XBots will move at a pre-configured maximum speed and acceleration
-
At the start of the command, the system determines the rectangular routing area based on the starting and ending positions of the specified XBots. During this stage, all the XBots inside the routing area/specified zone must be Idle or Stopped
-
During the auto driving motion, XBots not involved in the motion may not enter the routing area, but may continue their motions as usual outside of this area
For RoutingType, labeled routing means the specified XBots must go the corresponding positions specified in the position arrays. Ie. XbotID[0] must go to PosX[0] and PosY[0]. This should be used if the order of XBots is important, such as XBots 1 through 8 must line up in a line in ascending order.
For unlabeled routing, any of the XBots specified in the XBot ID array can go to any of the positions specified in the position arrays. Ie. XbotID[1] may go to PosX[0] and PosY[0], using the most convenient way possible. This should be used if the order of the XBots is NOT important, such as when 8 XBots should be in a line, but it does not matter which XBot is first, etc.
Changelog
PMC v117.6.17 - Added ZoneID: the user can now define a zone and route only within that region by suppling the ZoneID to the command
PMC v.117.20.40 - Added OverhangAllowed: the user can now choose if the XBots can extend beyond flyway boundaries (15 mm)